Paso 2: Código y rendimiento
Tres funciones de medición ósea capacitancia, inductancia y resistencia, debemos elegir que queremos hacer, para elegir la función y uso 2 bits puede contar 0-0,0-1,1-0,1-1.
Así que usamos dos interruptor para elegir, lo que los hace funcionar como un interruptor dip usándolos como tirar hacia abajo, para medir la inductancia está 0-0, 0-1 para capacitancia, resistencia de 1-0, que es cómo queremos medir.
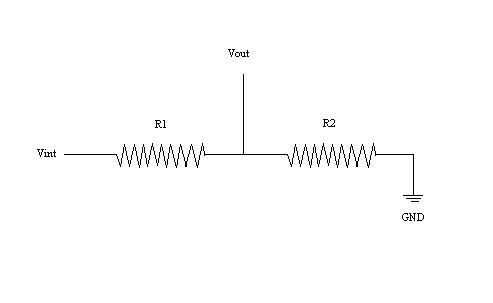
Para medir inductancia uso el LM393 comparador para medir la capacitancia el LM741 y para medir resistencias fácilmente utilizar una resistencia k 10 y hacer un divisor de tensión.
Supongamos que queremos calcular R1. Sabemos que R2 tiene un valor de 10k, sabemos que Vin tiene un valor de 5V (que generalmente encontramos en el entorno de Arduino) y que la lectura en un analógico Vout pin del Arduino es de 750.
1.-sabemos que la resolución de la ADC Arduino 10 bits, 1024 es divisiones posibles (2 elevado a 10) para un valor de entrada entre 0V y 5V. Así que si ponemos 5V en un pin analógico, su valor será el 1023 (1024 no recordará que empieza a contar en 0, no 1); Si ponemos 0V en el pin, su valor será 0 y si por ejemplo nos 2.5V su valor será 511.
Por lo tanto, si el valor que da el pin analógico de lectura en su valor digital es 750, podemos calcular Vout, la tensión de salida del divisor de voltaje.
>> 5V / 1024 divisiones = 0, 00488V / división
>> 0,00488 voltios / División de división • 750 = 3.66V
2.-ya podemos despejar R1, que era la pregunta:
>> Vout = (R2 / R1 + R2) • Vin
>> 3.66 V = (10k / R1 + 10k) • 5V
>> R1 + 10 k = 10 k • 5V / 3.66V
>> R1 = (10 k • 5V / 3.66V)-10 k = 3.66KΩ
En general, podemos calcular el valor de R1 como:
>> R1 = (R2 • Vin / Vout)-R2
Es el mismo código en la documentación española, tan si usted tiene alguna pregunta por favor dicen así:
#include LiquidCrystal lcd(13, 8, 7, 5, 4, 2); #define R_1 A1#define R_2 A2#define IND_1 6#define IND_2 12#define fuente_pin 11#define switch_pin 10#define descarga_pin 9#define PIN_1 A3#define PIN_2 A4//Variables leer pinesint pin_1;int pin_2;//Variables para inductometrodouble pulso;double frecuencia;double capacitancia;double inductancia;//Capacimetrofloat R = 1.0e6;float C = 0;float RC = 0;long t_inicio = 0;volatile long t_alto = 0;long T = 0;float VCC = 4.50;float Vref = VCC / 2;float V0 = 0;float error_correccion = 40.;int retardo_delay = 20;//Variables resistometroint vR_1 = 0;int vR_2 = 0;float Vin = 5;float Vout = 0;float Res_1 = 10000;float Res_2 = 9000000;float r_1 = 0;float r_2 = 0;float Resistor_1[8];float Resistor_2[5];float ResArreglo_1;float ResArreglo_2;void setup() { lcd.begin(16, 2);//Configuracion de pines pinMode(PIN_1, INPUT); pinMode(PIN_2, INPUT); //Configuracion Inductometro pinMode(IND_1, INPUT); pinMode(IND_2, OUTPUT); capacitancia = 0.000001021; //delay(200); //Configuracion de Resistometro pinMode(R_1, INPUT); pinMode(R_2, INPUT);//Configuracion Capacimetro attachInterrupt(1, stop, RISING); Vref = VCC / 2; pinMode(fuente_pin, OUTPUT); digitalWrite(fuente_pin, LOW); pinMode(switch_pin, INPUT); pinMode(descarga_pin, INPUT);}void loop() { leerpines();if (pin_1 == LOW && pin_2 == LOW) { digitalWrite(IND_2, HIGH); delay(5); digitalWrite(IND_2, LOW); delayMicroseconds(100);pulso = pulseIn(IND_1, HIGH, 5000); lcd.clear(); if (pulso > 0.1) { frecuencia = 1.E6 / (2 * pulso); inductancia = 1. / (capacitancia * frecuencia * frecuencia * 4.*3.1459 * 3.14159); inductancia *= 1E6;lcd.setCursor(2, 0); lcd.print("INDUCTANCIA:"); //delay(200); if (inductancia >= 1000) { lcd.setCursor(0, 1); int valor = (inductancia / 1000) - 0.5; lcd.print(valor); lcd.setCursor(6, 1); lcd.print("mH"); } else { lcd.setCursor(0, 1); int valor_2 = inductancia + 10; lcd.print(valor_2); lcd.setCursor(6, 1); lcd.print("uH"); } } else if (pulso < 0.1) { lcd.setCursor(2, 0); lcd.print("INSERTAR IND"); } delay(300); } if (pin_1 == LOW && pin_2 == HIGH) { lcd.clear(); for (int i = 0 ; i <= 7; i++) { Resistor_1[i] = analogRead(R_1); ResArreglo_1 = ResArreglo_1 + Resistor_1[i]; } vR_1 = (ResArreglo_1 / 8.0); Vout = (Vin * vR_1) / 1023; r_1 = Res_1 * (1 / ((Vin / Vout) - 1)); lcd.setCursor(2, 0); lcd.print("RESISTENCIA:"); if (r_1 <= 999) { lcd.setCursor(0, 1); lcd.print(r_1); lcd.setCursor(9, 1); lcd.print("Omhs"); } else if (r_1 >= 1000) { r_1 = r_1 / 1000; lcd.setCursor(0, 1); lcd.print(r_1); lcd.setCursor(9, 1); lcd.print("KOmhs"); } delay(500); ResArreglo_1 = 0; } if (pin_1 == HIGH && pin_2 == LOW) { lcd.clear(); if (debounce(switch_pin) == LOW) { pinMode(descarga_pin, OUTPUT); digitalWrite(descarga_pin, LOW); delay(100); pinMode(descarga_pin, INPUT); digitalWrite(fuente_pin, HIGH); t_inicio = micros(); } if (t_alto > 0 && t_inicio > 0 && (t_alto - t_inicio) > 0 ) { T = (t_alto - t_inicio); RC = -T / log((Vref - VCC) / (V0 - VCC)); //Vref = VCC/2 //V0 = 0V C = RC / R; //Valor en uF lcd.setCursor(0, 0); lcd.print("C:"); lcd.setCursor(3, 0); lcd.print(C * 1000, 1); lcd.setCursor(13, 0); lcd.print("nF"); lcd.setCursor(0, 1); lcd.print("C:"); lcd.setCursor(3, 1); lcd.print(C * 1000000 - error_correccion , 0); lcd.setCursor(13, 1); lcd.print("pF"); t_inicio = 0; t_alto = 0; digitalWrite(fuente_pin, LOW); delay(2000); } }}void leerpines() { pin_1 = digitalRead(PIN_1); pin_2 = digitalRead(PIN_2);}void stop(){ t_alto = micros();}int debounce(int pin){ int estado; int previo_estado; previo_estado = digitalRead(pin); for (int i = 0; i < retardo_delay; i++) { delay(1); estado = digitalRead(pin); if ( estado != previo_estado) { i = 0; previo_estado = estado; } } return estado;}













