Paso 3: conclusión
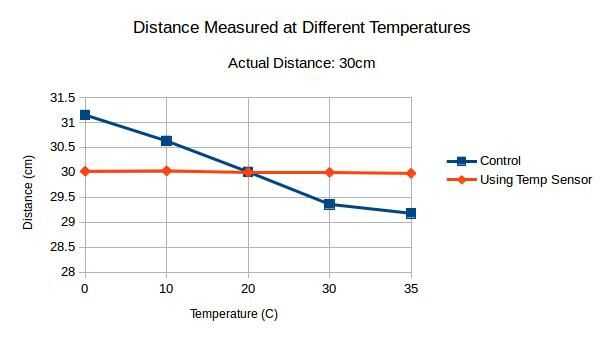
En conclusión este instructable mejoró la exactitud de un sensor de la gama ultrasónica. He subido un gráfico de una mis pruebas para demostrar que de hecho aumente la precisión en diferentes temperaturas. Como se puede ver, el control varía un poco dependiendo de la temperatura. Usando el sensor de temperatura, la mayor variación de 30cm fue de 0,03 cm.
Solución de problemas:
- Si no están recibiendo ninguna lectura serial, asegúrese de que esa depuración se establece en true y que todas las conexiones de hardware son buenas.
- Si el sensor de temperatura está muy caliente, desenchufe inmediatamente el Arduino y cambie las conexiones positivas y negativas.
- Si usted está recibiendo distancias absurdas, asegúrese de probar el sensor de temperatura. Un sensor de temperatura defectuoso puede cambiar grandemente la salida de la distancia.
Planes futuros:
- Integrar este sistema con más proyectos
- Crear un sensor de la gama ultrasónica submarina
- Mejorar otros sensores que utilizan técnicas similares
Mi objetivo de este instructable es a no sólo enseñar cómo mejorar la precisión de un sensor de la gama ultrasónica, sino abrir su mente a posibilidades más. Aunque una gama ultrasónica es un sensor simple y bien entendido, aún puede ser modificado para funcionar incluso mejor. Al crear proyectos siempre deben pensar las variables externas. En este caso yo pensaba acerca de la temperatura, pero por qué no opinas sobre exposición a los elementos, interacción humana o incluso extremas hacia fuera en el espacio. Muchas veces personas les gusta crear proyectos que han sido diseñados en un vacío, pero no es la manera en que funciona el mundo real. ¡ Espero que había disfrutado mi instructable y tal vez había aprendido algo demasiado!
Si te ha gustado este instructable, por favor asegúrese de favorito y vota por él. No dude en dejar comentarios constructivos!













")