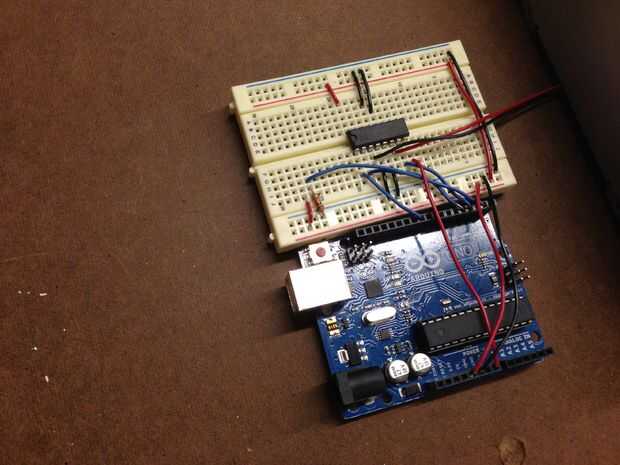
Paso 3: El H-puente conectado a Arduino (sin interruptor)
const int switchPin = 2; entrada del interruptor
const int motor1Pin = 3; Pierna del puente en H 1 (pin 2, 1A)
const int motor2Pin = 4; Puente H pata 2 (pin 7, 2A)
const int enablePin = 9; Puente H activar pin
void setup() {}
Coloque el interruptor como entrada:
pinMode (switchPin, entrada);
establecer todas las clavijas que utilizas como salidas:
pinMode (motor1Pin, salida);
pinMode (motor2Pin, salida);
pinMode (enablePin, salida);
pinMode (ledPin, salida);
conjunto enablePin alta para que el motor puede girar:
digitalWrite (enablePin, HIGH);
}
void loop() {}
Si el interruptor está alta, el motor girará en un sentido:
digitalWrite (motor1Pin, bajo); conjunto pata 1 de bajo puente en H
digitalWrite (motor2Pin, HIGH); conjunto pata 2 del H-puente alto
Delay(500); espera un segundo
Si el interruptor es bajo, el motor girará en sentido contrario:
digitalWrite (motor1Pin, HIGH); conjunto pata 1 del H-puente alto
digitalWrite (motor2Pin, bajo); conjunto pata 2 de bajo puente en H
Delay(500); espera un segundo
}





")
")
")

")



