





¿Qué es un Sumobot?
De alguna manera está relacionado con lucha de sumo de la vida real. Se colocan dos sumobots en un anillo, el objetivo es empujar dos uno al otro fuera del ring, cualquier parte del robot que toca fuera de la saca se considerarán derrotó. El que empujó el otro oponente fuera del ring será el ganador de la ronda, habrá tres rondas en cada batalla. Es un campeonato que pondrá a prueba tus habilidades en programación y en la construcción de su hardware. Hay tres divisiones en nuestro país, 400g, 500g y 1kg. Se Totalmente autónomo (tiene sin controles remotos, funcionar 100% con programas)
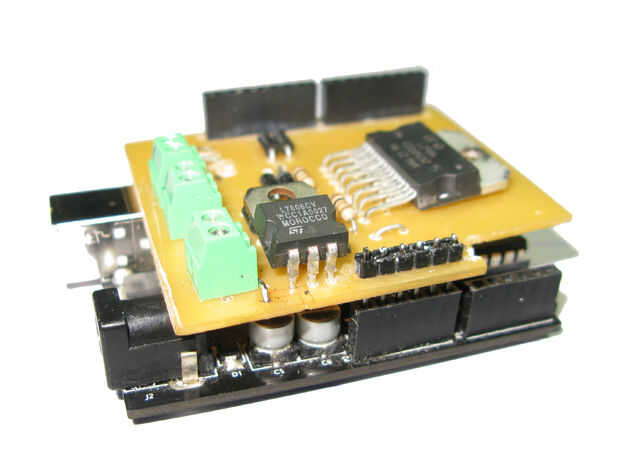
Realmente estoy utilizando un clon de "Arduino UNO", el ACEduino, como mi micro controlador. Los motores actuales son dos mabuchi (tablero de par Motor) instalado en un"Tamiya Twin" (203:1). Motores son impulsados el por mi escudo Motor DIY (<-guía Instructable) usando un chip de controlador de motor L298N.
El bot contiene 9 sensores en total. Hay 3 sensores de piso, 2 sensores de lado, 3 sensores delanteros y 1 sensor trasero. Es accionado por un 7.5v 950mAh batería de LiPo recargable y tiene una duración de 1 hora (batalla continua). El cuerpo es todo de acrílico, corte con una herramienta giratoria. Pesa 450g y tiene una fuerza de empuje de 1,9 kg. No es que rápido pero sin duda tiene mucho de empujar energía "torquey".
")
 ¿")
")

")








")