Paso 2: montaje
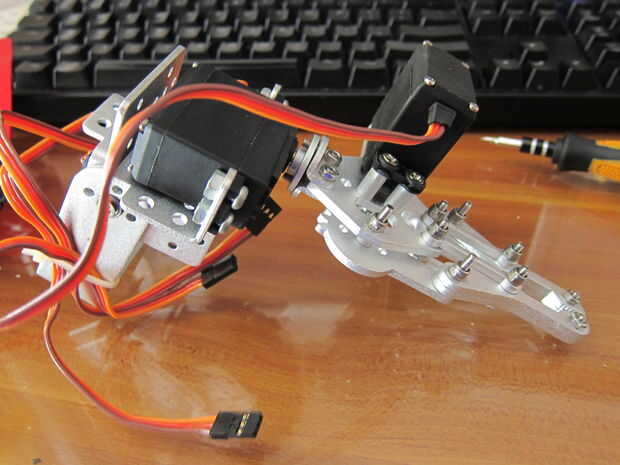
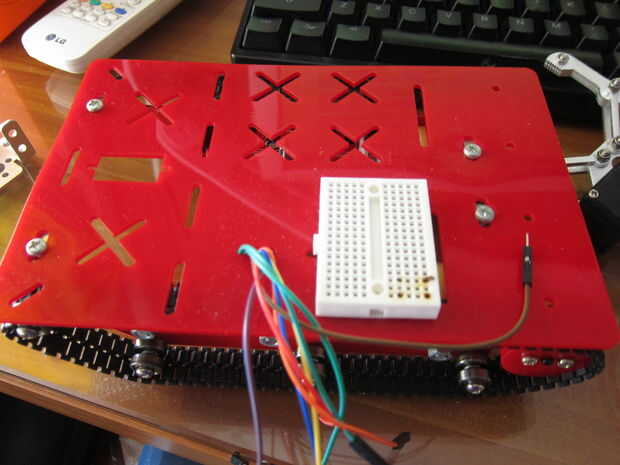
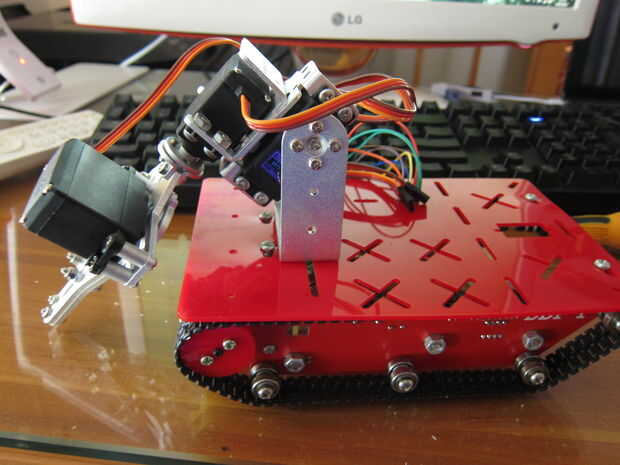
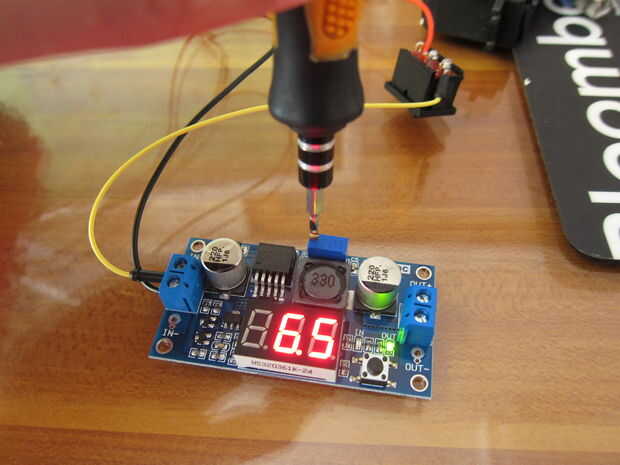
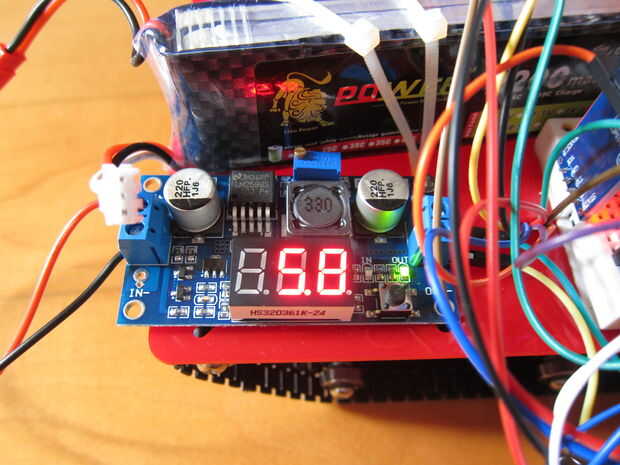
En este proyecto necesito la parte superior del brazo robot sólo. Tomar esta parte del conjunto y fijarla en el chasis del tanque inteligente. Lo garra recoge fácilmente, yo también han ajustado el ángulo del servo garra y hacer la uña en dirección horizontal cuando el servo es 0 grados. Me he di cuenta que el voltaje de la batería Li-Po es demasiado fuerte para el brazo del robot y el tanque inteligente, así que también compré un regulador buck para reducir la tensión. Este regulador del buck es muy conveniente porque podemos leer el voltaje de entrada y salida a través del indicador. Podemos utilizar un multímetro para calibrar el indicador en el primer tiempo. Después de la tensión se puede ajustar fácilmente con un destornillador. Vamos a ajustar la tensión de 5.8V. Lo soluciono Arduino MEGA 2560, pequeño protoboard, el buck regulador y batería de 9V caja en el chasis primero y luego hacen el cableado.











