Paso 3: cableado
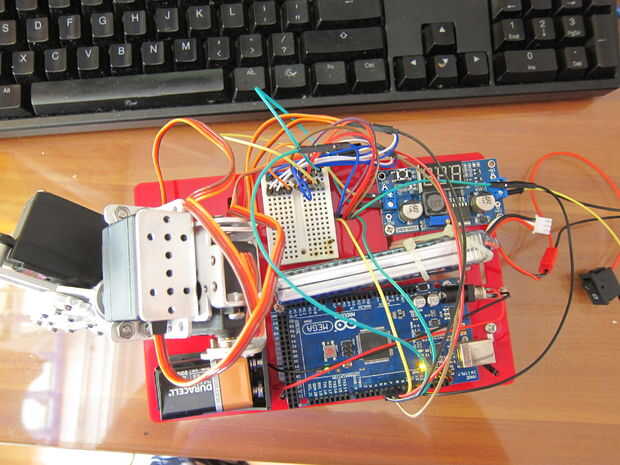
La batería de Li-Po está conectada a la entrada del regulador buck y el VCC de la salida es cableado con un interruptor y luego al protoboard. GND de la salida está conectada directamente a la placa. GND y VCC de los servos y dos lados del chasis están vinculados a GND y VCC de salida con protoboard. Para compartir el mismo suelo, pin GND de Arduino está conectado también a la tierra en el protoboard.
El cableado del chasis es el mismo que en el tercer proyecto. Solo copio lo siguiente:
IB en el lado derecho > pin 8
IA en el lado izquierdo > pin 9
IA a la derecha > pin 10
IB en el lado izquierdo > pin 11
Que el servo en la parte inferior sea servo1 servo2 media y la garra servo3 y están relacionados con Arduino como sigue:
Servo 1 > pin 5
Servo 2 > pin 6
Servo 3 > pin 7











