Paso 5: 2ª prueba
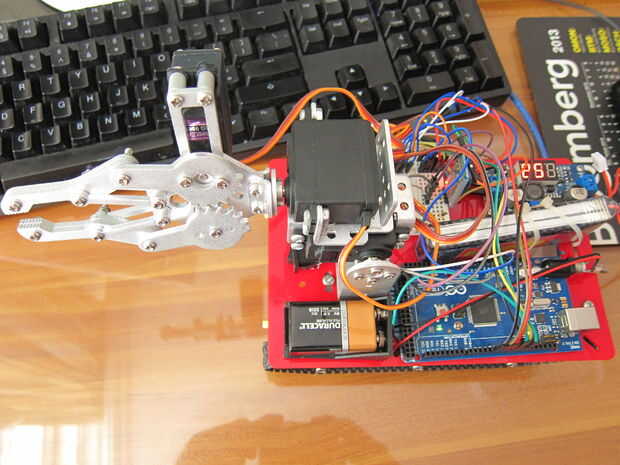
¡ Excelente! Se mueve perfectamente! Así que añadir el módulo Bluetooth para Arduino:
VCC > 5V
Tierra > tierra
TXD > pin 3
RXD > pin 2
Cargar el código en el proyecto 4:
#include <SoftwareSerial.h> SoftwareSerial BT(3, 2); //set TX and RX on bluetooth to pin 3 and 2 respectivelychar command;int motorPin = 8; //right side to IB - forwardint motorPin2 = 9; //left side to IA - forwardint motorPin3 = 10; //right side to IA - backwardint motorPin4 = 11; //left side to IB - backwardvoid setup() { BT.begin (9600); pinMode(motorPin, OUTPUT); pinMode(motorPin2, OUTPUT); pinMode(motorPin3, OUTPUT); pinMode(motorPin4, OUTPUT);}void stop() { digitalWrite(motorPin, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW);}void forward(){ digitalWrite(motorPin, HIGH); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, LOW); } void backward() { digitalWrite(motorPin, LOW); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, HIGH); } void turnLeft() { digitalWrite(motorPin, HIGH); digitalWrite(motorPin2, LOW); digitalWrite(motorPin3, LOW); digitalWrite(motorPin4, HIGH); } void turnRight() { digitalWrite(motorPin, LOW); digitalWrite(motorPin2, HIGH); digitalWrite(motorPin3, HIGH); digitalWrite(motorPin4, LOW); }void loop() { if (BT.available() > 0) { command = BT.read(); switch (command) { case 'w' : forward(); break; case 'x' : backward(); break; case 'a' : turnLeft(); break; case 'd' : turnRight(); break; case 's' : stop(); break; } }} Y utilizar la aplicación Android en el 4 º proyecto para probarlo...
No hay respuesta.
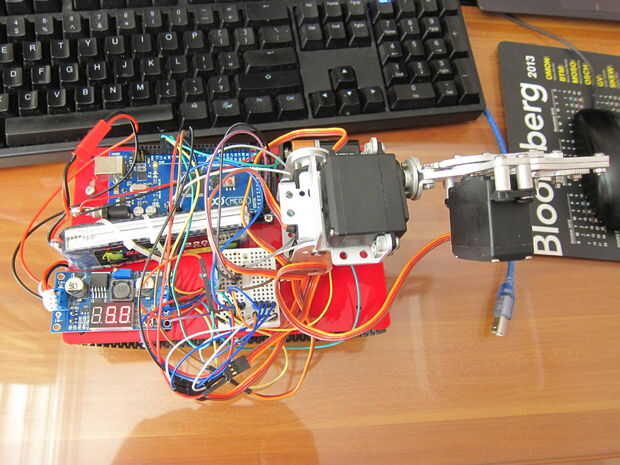
Ha probar el brazo robot y smart tanque por separado y ambos están muy bien, y estoy seguro de que el módulo de Bluetooth funciona correctamente. El problema debe estar en el cableado. Cambiar los pines RX y TX pero no funcionó... Tan desalentadoras...: ()
Así que tratar de mendigar una respuesta de google y obtener esta información por casualidad:
http://www.Arduino.CC/en/Reference/SoftwareSerialExample
Nota:
No todos los pines con el apoyo de Mega y Mega 2560 cambian interrupciones,
tan sólo las siguientes pueden utilizarse para RX:
10, 11, 12, 13, 50, 51, 52, 53, 62, 63, 64, 65, 66, 67, 68, 69
El módulo de Bluetooth no se pudo comunicar con Arduino simplemente porque he utilizado el NIP incorrecto! Así que cambio de TX y RX a 52 y 53 respectivamente e inténtelo de nuevo. ¡ Funciona!











