Paso 1: Lista de materiales







2 - módulo OCTAGON GioBlu robótica http://www.gioblu.com/prodotti?page=shop.product_details&flypage=flypage_images.tpl&product_id=136&category_id=60 u otro marco
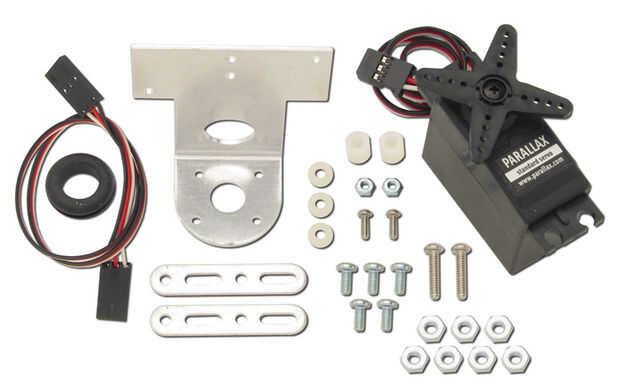
1 - Ping))) soporte de montaje de paralaje kit http://www.parallax.com/Store/Robots/AllRobots/tabid/755/ProductID/248/List/0/Default.aspx?SortField=ProductName, ProductName
2 - servo motores con rotación de 360, en mi caso HSR-1425SCR
2 - ruedas de 6 cm con goma antideslizante
1 - servo std para el Ping (en mi caso no es necesario pero puede ser puesto en ejecución)
2 - servo soportes Gioblu robótica http://www.gioblu.com/prodotti?page=shop.product_details&flypage=flypage.tpl&product_id=78&category_id=34
4 - separadores PCB de 4 cm http://http :// www.robot-italy.com/product_info.php?cPath=7_135&products_id=1189
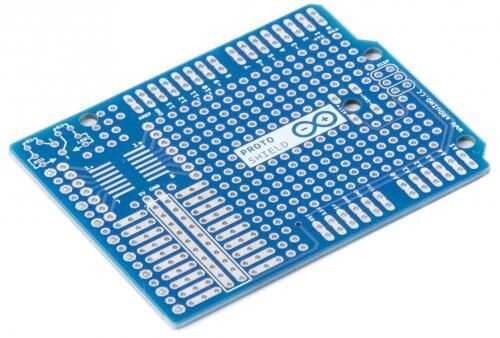
2 - protoschield para servos, batería y pantalla y agregado http://www.robot-italy.com/product_info.php?products_id=879(o sitios)
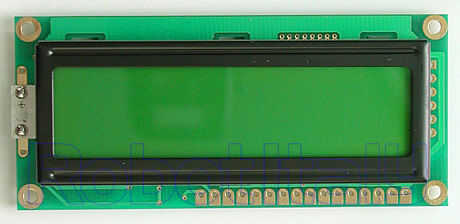
1 - 16 x 2 HD44780 compatible pantalla LCD http://www.robot-italy.com/product_info.php?cPath=59_194&products_id=237
1 - potenciómetro
1 - soporte de la batería 9v
1 - 2s Lipo 1200mAh 7,4 v
1 - UBEC 5.4 / 6V http://www.cnchelicopter.com/servlet/the-1528/hobbywing-UBEC-dsh-3A-(2-dsh-6S-Lipo/Detail
1 - rueda pivot
1 - pieza de Junta de la matriz para el protector de pantalla
-algunos tira escudo
-algunos tornillo paciencia y pasión...










")


