Paso 6: Montaje de la estructura del ROBOT - segundo
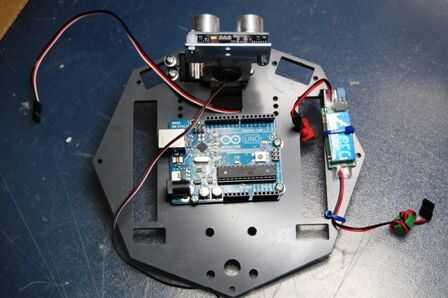
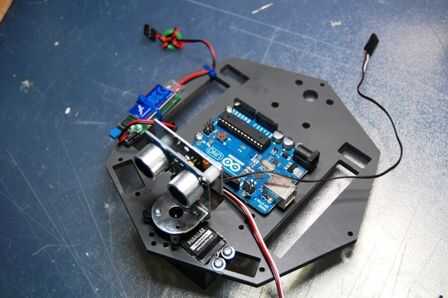

Hice un espacio para el servo de Ping, cuatro orificios para fijar el Arduino y puse la correa de fijación con un UBEC que ves a la izquierda y derecha de las dos fotos.
Para aquellos no familiarizados en la práctica, se utiliza para regular el voltaje de salida de la batería, porque la lipo 2s tiene un voltaje de 7,4 v, mientras que el servo tiene una gama de voltaje de conducción de 4,8 v a 6.
También puede ser utilizados diodos u otros.
Inserte a espaciadores y superponer el primer fotograma al segundo.










")


