Paso 6: Servomotores


De Servos de la Sao 2 "o MICBot2 mover os servomotores utilizados para" Rotação Continua Hitec HSR-1425CR.
Recomendado o HSR-1425CR para os Projetos de robôs móveis, este inclui um potenciómetro ajustável para centrar o servo e pode ser controlado directamente por microcontroladores através de envio de impulsos diferentes mediante se pretende rodar motor ou o de parar.
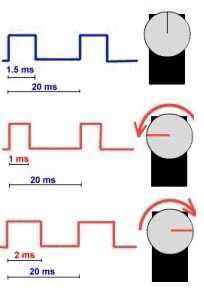
Portanto, consoante una largura hacen impulso o servomotor reagirá de maneira diferente.
Um impulso de 1,5 ms coloca servomotor de o ningún centro.
Um impulso de 1 ms, coloca para roda la esquerda.
Um impluso de 2 ms, para la roda o servomotor direita.
No final, é necessário colocar una linea alimenta o servomotor a "0" até perfazer um ciclo de 20 ms contando o tempo de activação servomotor.
Foi también utilizado um micro servo Hitec da para o movimento sensor ultra-sónico SFR05, de maneira a tornar o robot mais leve mais pequeno, e también para utilizar os dois tipos de servomotores Liberalization.


")
 utilizando un Arduino")



")
")




