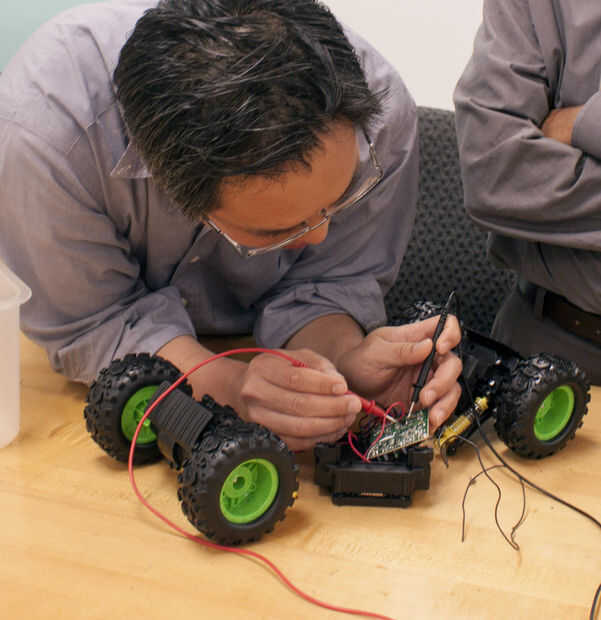
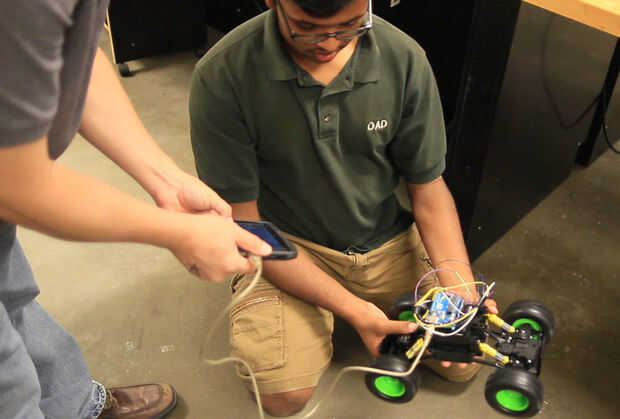

Recientemente compramos un rover de China que hemos controlado con una placa Arduino y MICILE dos tabletas. El proyecto de rover fue exitoso, así que decidimos intentarlo de nuevo, pero esta vez estamos convirtiendo un carro de control remoto para un rover, opción un poco más accesible y un poco menos cara que el original rover que compramos. No sólo es más barato, parece ser un poco más robusto, así el carro RC. La tableta MICILE nos permite muchas opciones a la hora de controlar a la rover, incluyendo un acelerómetro (para movimiento volante y delantero/al revés) así como la cámara integrada (para enviar imágenes detrás de donde se encuentra el rover). Por lo tanto, igual que con nuestro primer proyecto de rover, vamos a utilizar dos tabletas MICILE, uno en la rover, uno con la persona que controla al rover. La tableta MICILE unida a la rover utiliza la cámara integrada para captura de vídeo que se envía a la segunda tableta MICILE. La segunda tableta MICILE se utiliza para controlar al rover. Esto es sólo parte de nuestro proyecto.
Nuestro proyecto consiste en instalar un Arduino Uno sobre el tablero de control del carro RC. Usaremos una aplicación de consola para la tableta MICILE para determinar que los cables de control del volante y que controlan el movimiento hacia adelante y hacia atrás.











