Paso 1: El chasis
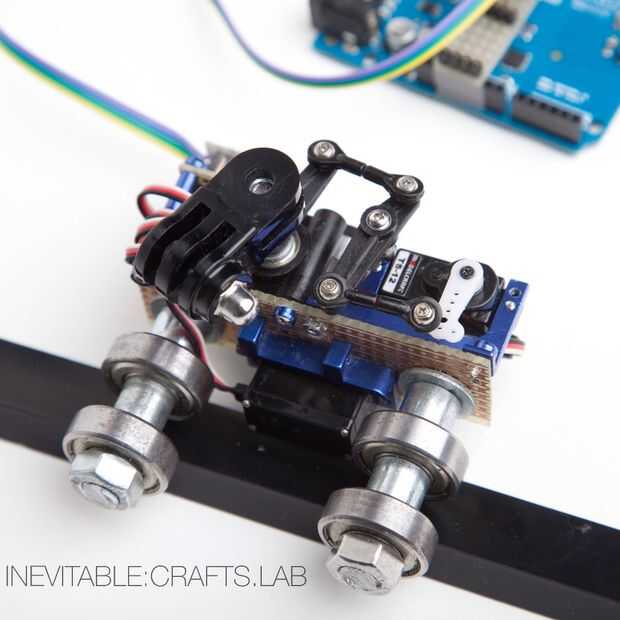


El chasis está construido en placa perforada de PCB.
Utiliza dos pernos M8 como ejes para los cojinetes de bolas de patín.
Los servos se montan con dos servo monturas desde un helicóptero TREX450-clon.
La distancia entre los rodamientos se encuentra vía tubos de distancia de las ruedas de patín.
En las fotos, utilizo dos conjuntos de dos rodamientos.
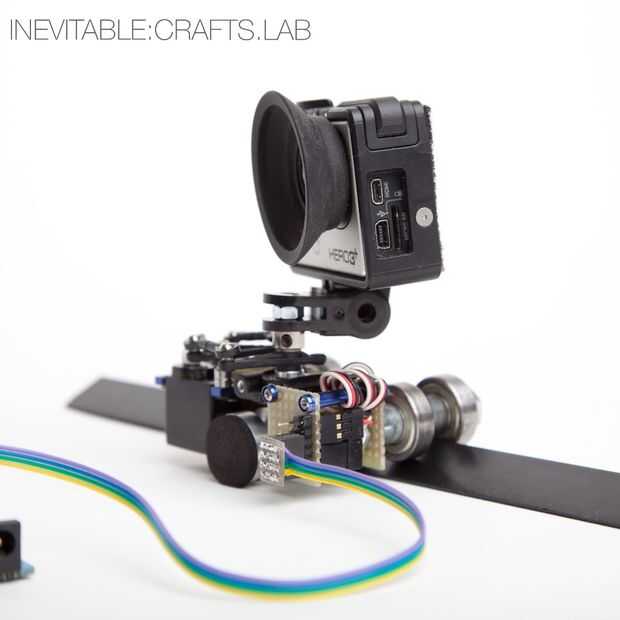
Para ello se pretende sólo dejarlo correr en una pista con un lado.
El otro lado está siendo impulsado con el motor servo y ejecuta directamente en el suelo.
Eso significa que sólo utiliza una pipa, que debería ser más fácil de organizar en el lugar en vez de traer dos tubos.
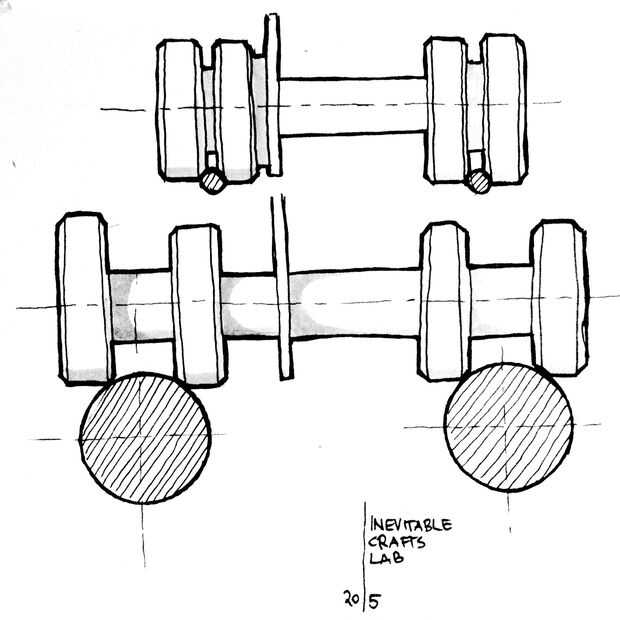
Hice un dibujo que ilustra esa opción.
La superior es apenas una cuña entre dos rodamientos, el inferior es un pip de distancia entre dos rodamientos.


")

 con un Micro Arduino Pro")







")