Paso 3: Montar los cerebros y IMU

Arduino Nano
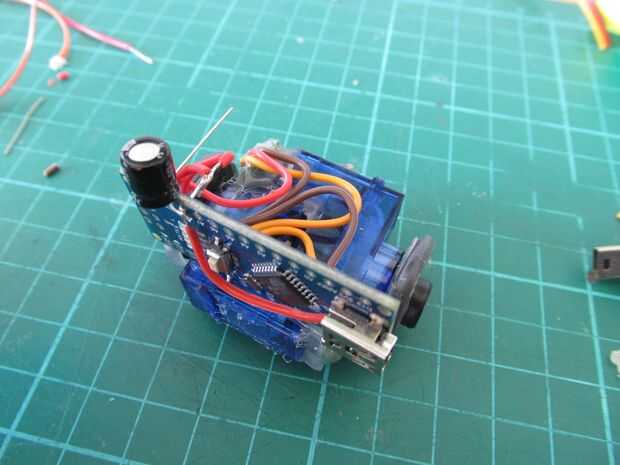
El Arduino Nano encaja perfectamente en la parte posterior. Es hotglued en lugar. Luego se sueldan los cables de Servo sobre él. Dos otras modificaciones tienen que hacerse a ella:
- Un gran condensador entre masa y energía. La mía es 470uF, 10V. Esto evita brown-outs cuando los motores en marcha. Mantener las piernas largas por lo que se pueden soldar a otros dispositivos a la misma.
- Un alambre soldado desde la línea de 5V del puerto USB a la línea de 5V del robot. Regulador debe el Nano proporcionar 5V a 500mA a eso Perno de todos modos, pero el nano mantenía fuera dorado. Este cable lo solucionó.
El IMU
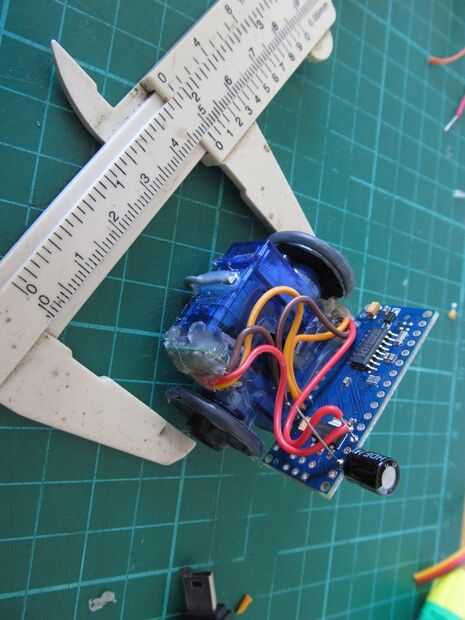
El IMU tiene una brújula en el mismo y debe mantenerse lo más lejos de los motores como sea posible. Habla i2c, por lo tanto debe conectarse a A4 y A5 del Arduino nano. Ambos quedaron satisfechos al mismo tiempo mediante el uso de encabezados de curva a los dos. Que sea tan alto como sea posible. Alimentación y tierra se conectan a donde necesitan estar.











")
