Paso 5: sensores
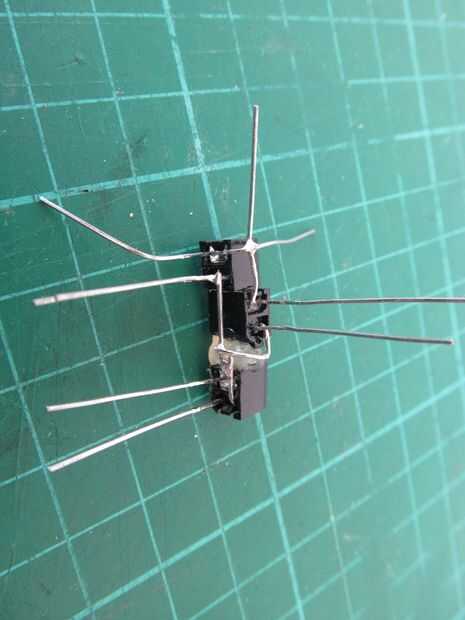


Montaje RPR220
Los sensores que componen este robot son de RPR220, son optoacopladores reflexivos y medir el consisten en IR led y un fotodiodo IR. Mediante un resistor y un ADC, podemos medir distancia. Para más detalles, ver mi tutorial sobre esto:
Hay tres RPR220 a cada lado del robot, dispuesto de modo que dan una frente alta y baja hacia el interior y un sensor de frente exterior de altura media. Esto permite al robot distinguir entre un objeto pequeño puede pulsar (por ejemplo, dados o mármol) y una pared. Como todo lo demás, se encuentran montados con pegamento caliente.
Conducción de los sensores
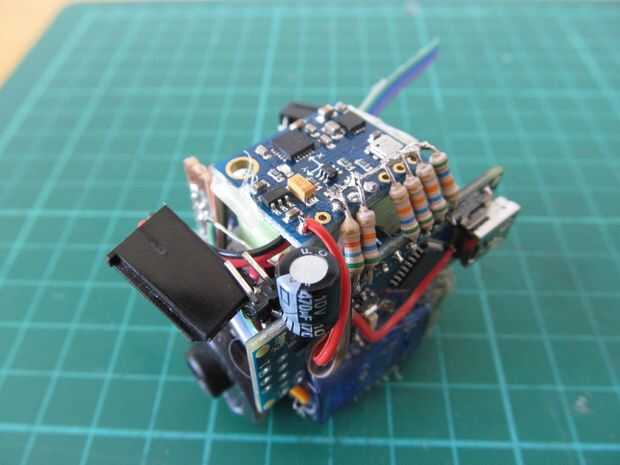
Necesitamos soldar 6 resistencias entre el suelo de la ADC y el fotodiodo va entre la ADC y la línea de alimentación. La corriente del fotodiodo permite a través de causas una tensión entre la ADC y la tierra, que podemos medir.
Usted puede conducir un solo LED directamente desde un pin del arduino, pero necesitamos a seis. Esto lleva a 300mA total, que es sobre el sorteo del paquete total de nano (200mA), así que tenemos que usar un transistor y condúzcalos a la vez. Elegí el 2N222A porque son baratos y disponibles. Puede proporcionar potencia más que suficiente.
Así que los LED son dos lotes de 3 en serie, con un pequeño resistor en serie para regular la corriente. Tenga en cuenta que el 2N222A va entre el LED y a tierra. Puede probar el LED con una cámara sin filtro IR.
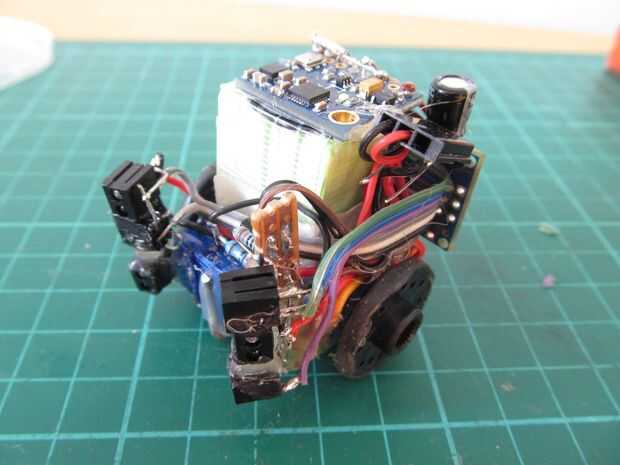
Esta es la parte más difícil en mi opinión. Hay tan muchas piernas, cables y otras cosas volando alrededor. No voy a describir donde va cada cable. Si lo hice me tardaría un año. Esta fue mi primera vez intentando algo como esto, y lo conseguí. Por lo tanto no puede ser tan difícil.











")
