Paso 1: Construir el HARDWARE de DOLLY
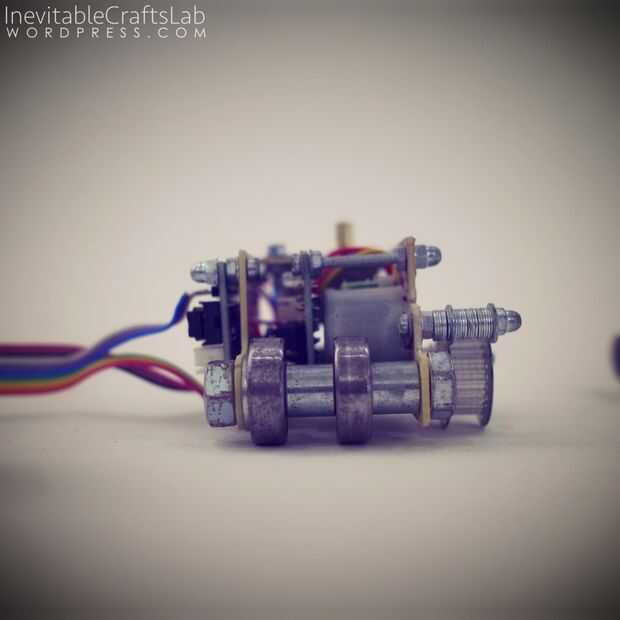
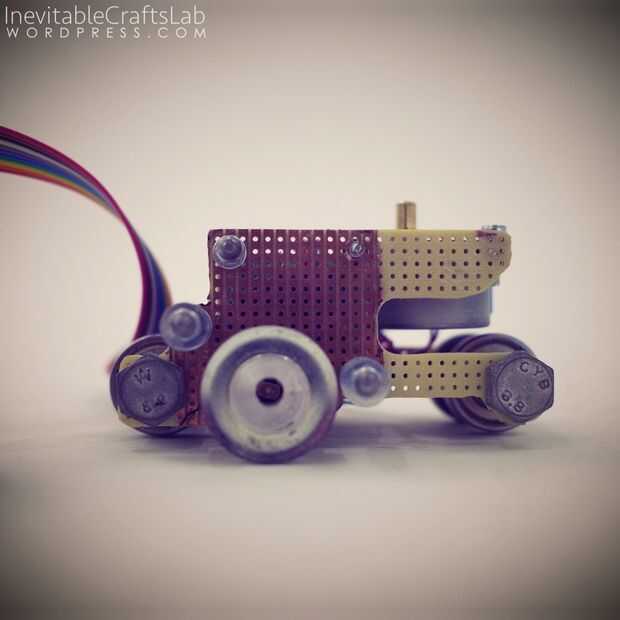
Como se puede ver en las fotos, el carro se hace de dos PCB que forman las dos partes, conectadas por dos pernos M8 que funcionan como ejes para las ruedas de giro libres.
Uno de los motores PAP representa la tercera rueda (accionada).
En las fotos hay es una rueda montada a él, pero también puede utilizar una goma rueda con más tracción a utilizarlo sin la correa como en el microdolly servo accionado formuló:
Usé el taladro de 3mm para todos los agujeros excepto los ejes.
Voy a añadir un dibujo donde usted puede contar los agujeros de la PCB para obtener las dimensiones.
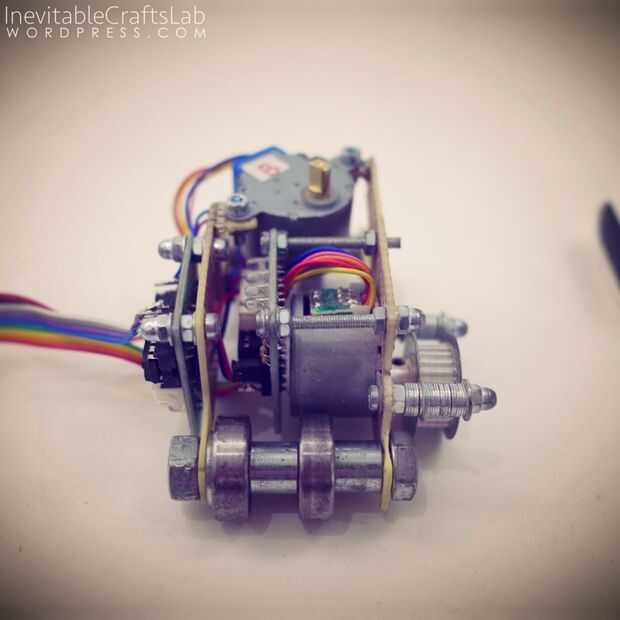
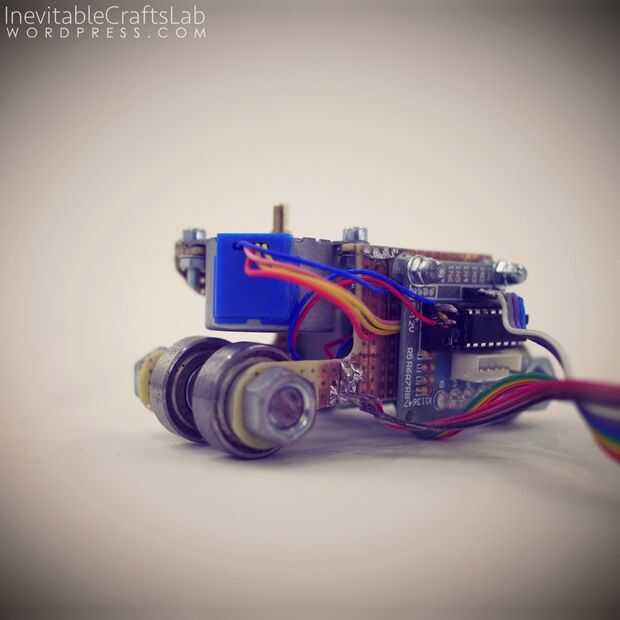
Los conductores de los dos motores PAP se montan con tornillos M3, como se puede ver en la foto de arriba, usted podría también utilizar tornillos más largos para los conductores y uso de las mismas en ambos.
Corté los cables que conectan el paso a paso con el conductor, reducida ellos y soldada directamente a la parte posterior de los conductores.
Ambas líneas de alimentación de los tableros del controlador paso a paso se sueldan a dos tiras respectivas del chasis PCB.
Como se puede ver en las fotos, hay un tercer cable soldado a esa zona, planea utilizar para un disparador de la cámara en un punto posterior.







")





