Paso 1:
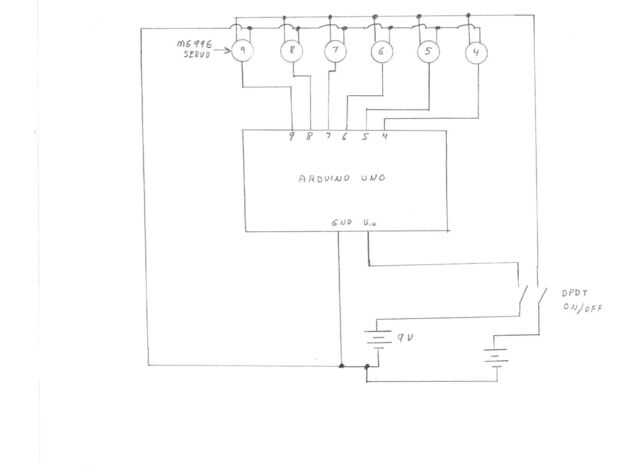
Vamos a empezar con lo que se hizo bien. Usé MG996 Servo motores, alto esfuerzo de torsión y menos de diez dólares en Amazon.com. He numerado los motores "4" al "9" y había marcado ese número en la cara visible de cada motor. Los números del motor corresponden al número de pin del Arduino y la descripción de software. Así, el motor Servo "4" va al pin "4" en el Arduino y se llama "S4" en el software.
Para caminar, primero tuve que cambiar el peso por lo que se centró sobre el pie izquierdo. Esto implicó mover motores "4,5,7 y 8. Esto es seguido por levantar el pie derecho (motor 7 en el pie izquierdo).
A continuación, el pie derecho debe avanzar y esto se logra usando el motor "9." Porque el cuerpo se tuerce, motor "6" debe ser operada para mantener el pie derecho recto.
A continuación, se baja el pie derecho, luego peso cambiado de puesto, pie izquierdo levantado, se movió hacia adelante, etc..











