Paso 2: Pegar las partes del cuerpo juntas

Ahora que ha creado el robot partes del cuerpo, puede empezar a pegarse utilizando cualquier pegamento.
Proceso :
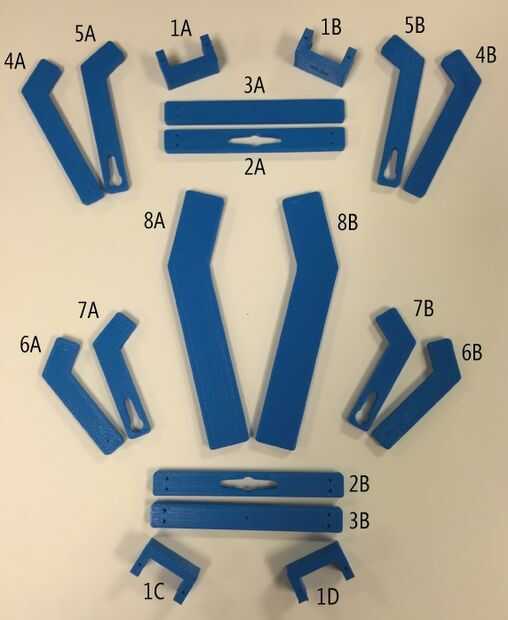
Iniciar con pegar las dos piezas semi idénticas para las seis partes del cuerpo entre sí:
- 4A - 5A
- 4B - 5B
- 2A - 3A
- 2B - 3B
- 6A - 7A
- 7B - 6B
Después de las seis partes del cuerpo principal se unen fuertemente juntos, instale dos soportes de motor servo (1A, 1B, 1C y 1D) las caderas y dos soportes de motor de servo en el hombro. Asegúrese de que prueba la orientación de los soportes de motor servo que irían los cables dentro del robot.
- 1a y 1B al hombro
- 1C y 1D a las caderas













