Paso 3: Colocar Servo motores
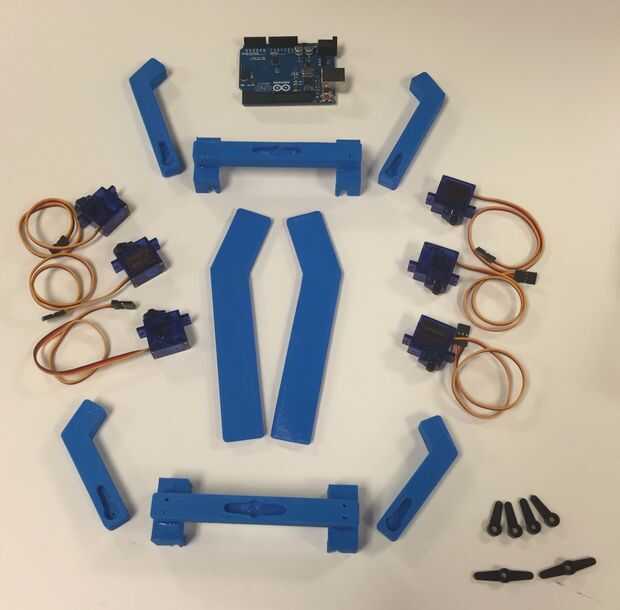

Ahora que tienes las partes del cuerpo preparadas, su tiempo para cada miembro individual para ser propulsado por un motor servo.
Proceso de:
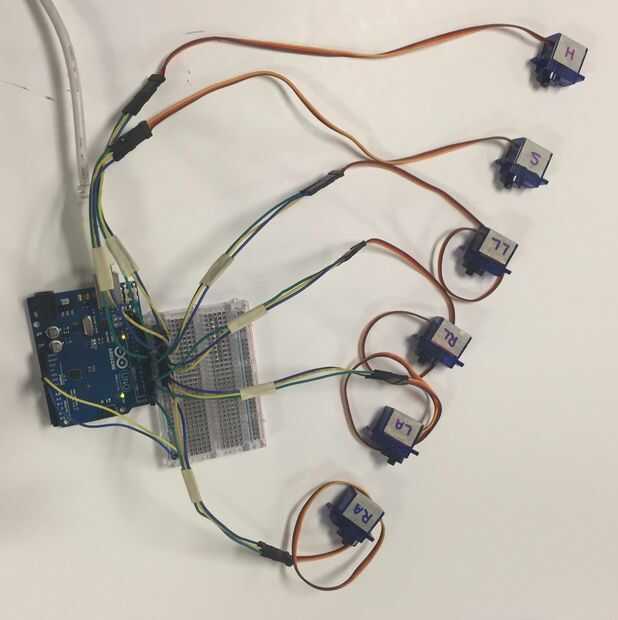
El primer paso es fijar el ángulo inicial de los motores servo a 90 grados:
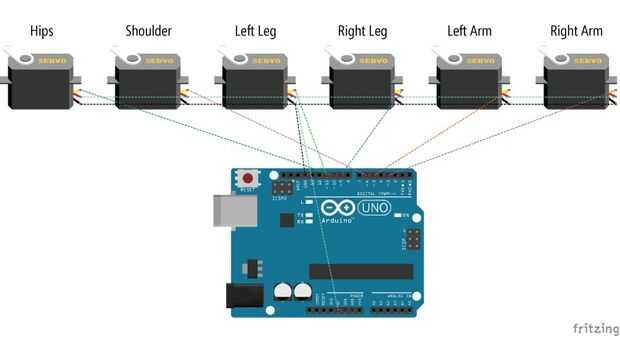
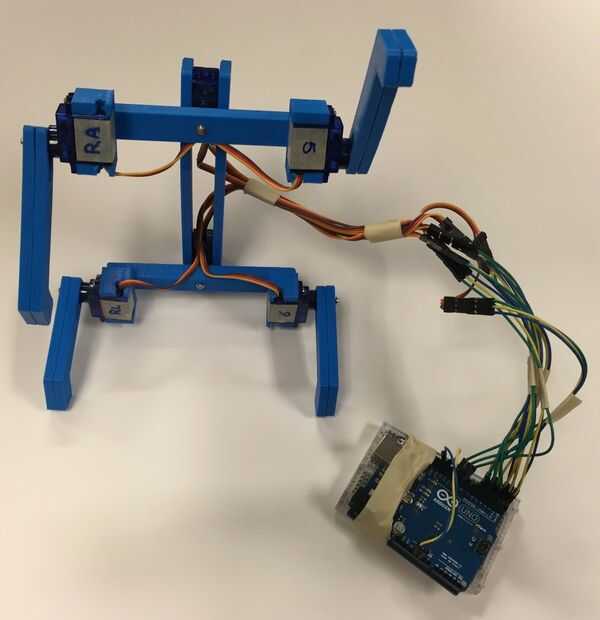
- Agregado el seis servo motores para Arduino según el esquema.
- Programar el Arduino con este código que sólo sería el ángulo de todos los motores servo a 90 grados.
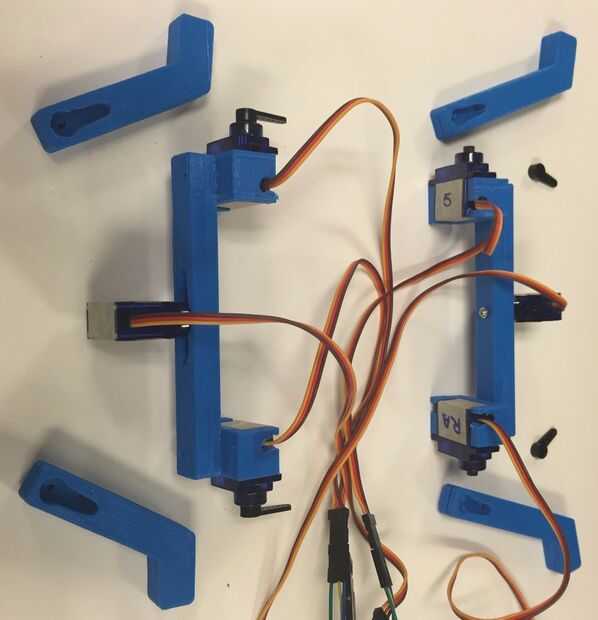
- Conecte los servos: RightArm, LeftArm, RightLeg y LeftLeg a las caderas y soportes motor servo del hombro y fíjelos con dos tornillos.
- Adjuntar los cuernos servo a los servomotores de acuerdo con esto:
- Hombros y caderas usan los cuernos de tamaño completo servo que son perpendiculares a los servos (mientras se encuentra a 90 grados.) Utilice un tornillo que se sujete firmemente.
- Las piernas (que son más pequeñas que los brazos) utilizan los cuernos servo de tamaño medio que son perpendiculares a las caderas.
- Los brazos también utilizaría los cuernos servo de tamaño medio. Pero son perpendiculares a la principal parte del cuerpo (la mayor parte) para adjuntarlos en consecuencia.













