Paso 4: Código para arriba!
Como te prometí antes, le proporcionaré el código y sí dte olvides de cambiar la velocidad de transmisión según la tasa de baudios de tu HC-05 módulo la velocidad en baudios predeterminada es 9600, pero mina fue 38400, así que tuve que cambiarla y te recomiendo todos para ir a través de los comentarios en el código de.
El código:
Este código es desarrollado por Hemanth Krishna para educación
unicamente.
Habló el corredor.
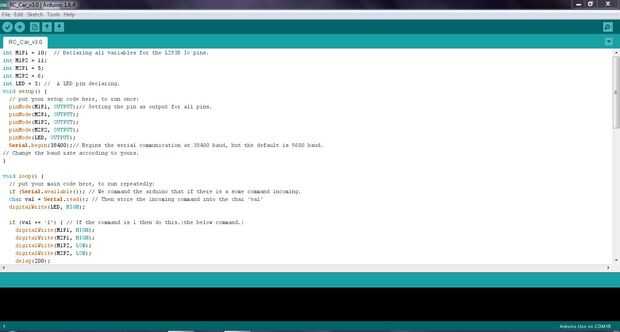
int M1P1 = 10; Declarar todas las variables para los pines del L293D Ic.
int M1P2 = 11;
int M2P1 = 5;
int M2P2 = 6;
int LED = 3; Un LED pin declarando.
void setup() {}
Pon tu código de instalación, para ejecutar una vez:
pinMode (M1P1, salida); / / configurar el pin como salida para todos los pines.
pinMode (M2P1, salida);
pinMode (M1P2, salida);
pinMode (M2P2, salida);
pinMode (LED, salida);
Serial.Begin(38400); / / comienza la comunicación en serie a 38400 baudios, pero el valor predeterminado es 9600 baudios.
Cambiar la velocidad de transmisión según el suyo.
}
void loop() {}
Pon tu código principal, para ejecutar varias veces:
Si (Serial.available()); Mandamos el arduino eso si hay algún comando entrante.
char val = Serial.read(); Luego almacenar el comando entrante en el char 'val'
digitalWrite (LED, alta);
Si (val == '1') {/ / si el comando es 1 entonces ello. () el siguiente comando.)
digitalWrite (M1P1, alto);
digitalWrite (M2P1, alto);
digitalWrite (M1P2, bajo);
digitalWrite (M2P2, LOW);
Delay(200);
digitalWrite (M1P1, LOW);
digitalWrite (M2P1, LOW);
Serial.println('Forward'); SEGUIR adelante
}
Si (val == '2') {//If el comando es 2 entonces ello. () el siguiente comando.)
digitalWrite (M1P1, alto);
digitalWrite (M2P1, LOW);
digitalWrite (M1P2, bajo);
digitalWrite (M2P2, LOW);
Delay(200);
digitalWrite (M1P1, LOW);
Serial.println('Left'); IR a la izquierda
}
Si (val == '3') {//If el comando es 3 entonces ello. () el siguiente comando.)
digitalWrite (M2P1, alto);
digitalWrite (M1P1, LOW);
digitalWrite (M2P2, LOW);
digitalWrite (M1P2, bajo);
Delay(200);
digitalWrite (M2P1, LOW);
Serial.println('Right'); A la derecha
}
Si (val == '4') {//If el comando es 4 entonces ello. () el siguiente comando.)
digitalWrite (M1P2, alto);
digitalWrite (M2P2, alto);
digitalWrite (M1P1, LOW);
digitalWrite (M2P1, LOW);
Delay(200);
digitalWrite (M1P2, bajo);
digitalWrite (M2P2, LOW);
Serial.println('Backward'); IR hacia atrás
}
Si (val == de ') {//If el comando es s entonces ello. () el siguiente comando.)
digitalWrite (M1P1, LOW);
digitalWrite (M1P2, bajo);
digitalWrite (M2P1, LOW);
digitalWrite (M1P2, bajo);
Serial.println('Stop!'); PARADA
}
}
Así que ahora supongo, están listos para ir y permite proceder!




")





")


