Paso 1: El circuito
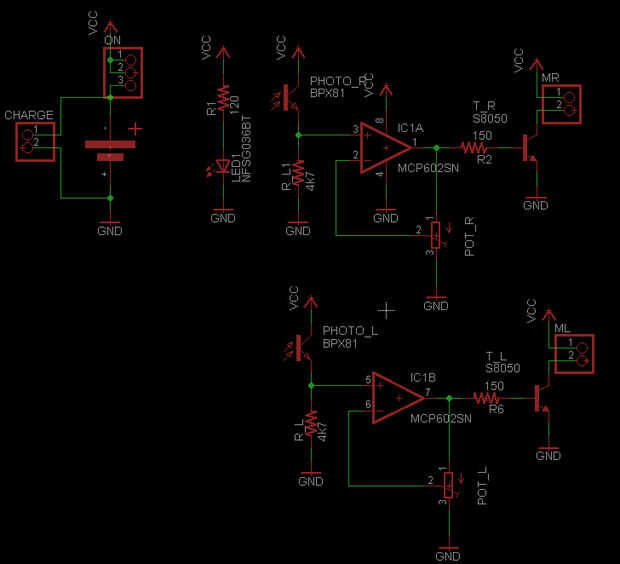



Allí es un LED IR apuntando hacia abajo en la parte frontal del robot, la luz reflejada es detectada por dos fototransistores, entonces, la señal de voltaje se envía a lo op-amp y enviar más o menos corriente para el motor (a través de un transistor NPN) dependiendo de la ganancia, ajustado con el pote de regeneración.
El diseño del circuito se divide en dos partes iguales, que tienen la misma percepción y componentes de conducción.
El robot funciona de esta manera:
Cuando está en la línea de negro, avanza a una velocidad media, cuando la línea se curva, uno de los fototransistores es la línea y el otro va en él; la señal del fototransistor la línea es un voltaje mayor que antes, porque es la resistencia haya bajado, luego el op-amp envía una señal más grande que el transistor y el motor de su lado vaya más rápido, volviendo el robot en la línea.
Si quiere crear un robot que sigue una línea blanca sobre fondo negro, deberás cambiar los alrededores del fototransistor y la resistencia del divisor, por lo que el fototransistor tiene un emisor conectado a GND y el colector a la resistencia y la IN + del amplificador operacional.
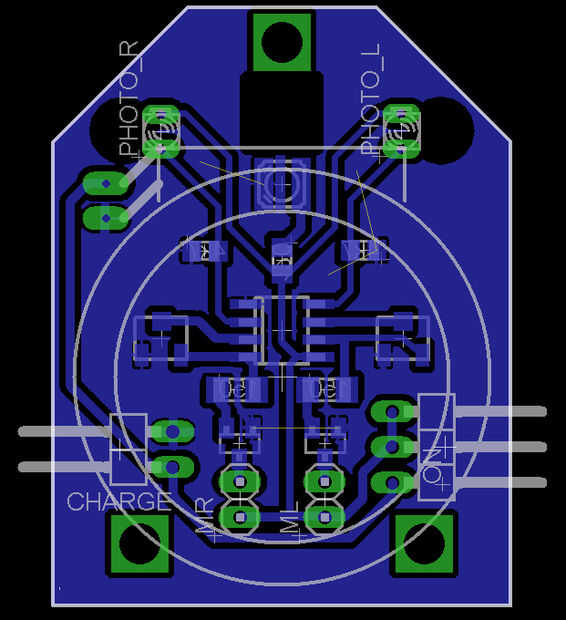
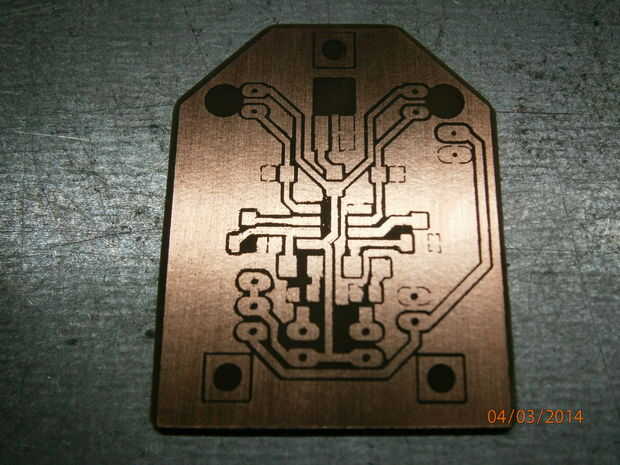
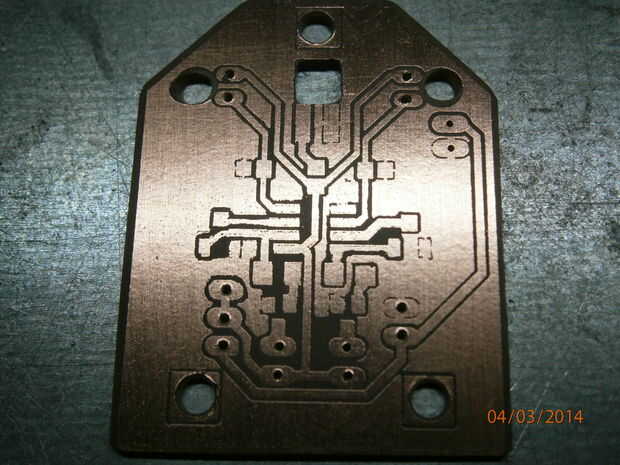
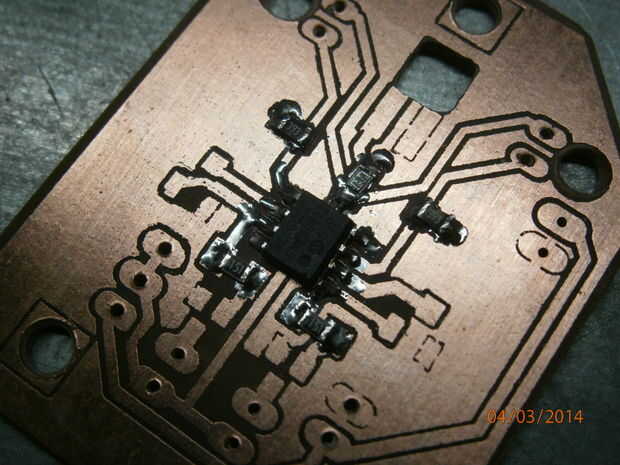
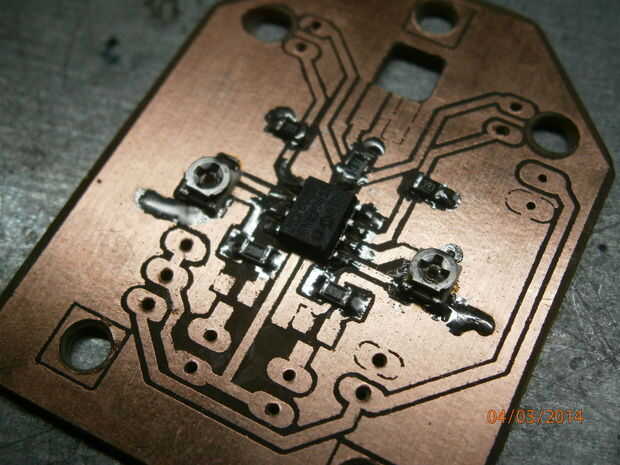
Para hacer el circuito que tendrá que hacer el PCB, puede imprimir el siguiente PDF o pedir uno con el. Archivo BRD.
Los componentes que utiliza son:
-Dos fototransistores de 3mm (mina de TCRT5000 módulos)
-IR LED
-2 x y 3 x doblaron hombres encabezados y un puente.
resistencias de-0805 (2x4K7, 2x150ohm, 1x120ohm)
pote de K -2 x 10 3 mm SMD
-2 x transistores SMD S8050
-un MCP602SN dual op-amp (riel)

")
")

")








