Paso 11: Cableado - controlador de Motor

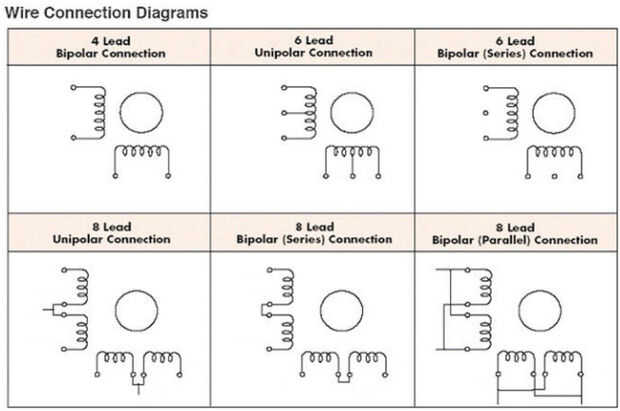




-Unipolar.
-Bipolar con bobinas de serie. Esto da mayor inductancia pero menos corriente por la bobina.
-Bipolar con bobinas paralelas. Esto requiere mayor corriente pero puede funcionar mejor como la inductancia de la bobina se reduce.
-Bipolar con una sola bobina por fase. Este método ejecuta el motor en sólo la mitad las bobinas disponibles que reducen el esfuerzo de torsión de poca velocidad disponible pero requiere menos corriente.
Los motores son motores unipolares por lo que necesitarás pasar 5 cables desde un controlador de motor a cada motor. Los dos cables comunes llamados desde el controlador del motor están conectados al motor de cuatro cables (rojo, verde, amarillo y negro), haciendo un grueso cable común.




 - Arduino basado (GRBL)")








