Paso 6: Componentes electrónicos, motores
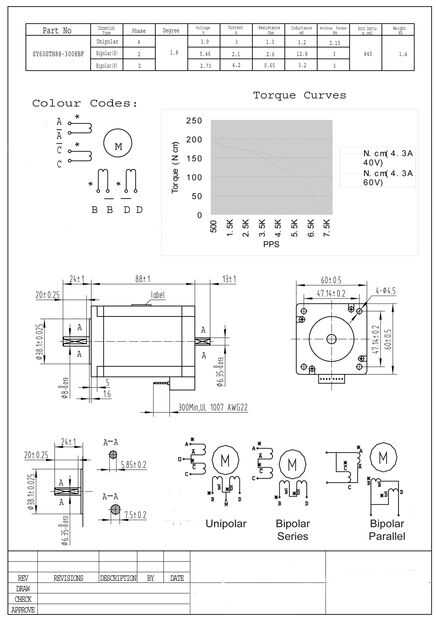
Los motores elegidos para este proyecto son motores de 3Nm alambre de 8 paso a paso que pueden conectarse como unipolar o bipolar, según elección de cada uno o qué controlador tienes (unipolar o bipolar).
-3 pedazos de motores paso a paso de 3Nm
Un motor de pasos unipolar tiene dos bobinados por fase, uno para cada dirección del campo magnético. El motor tiene solamente cinco.
Motores bipolares tienen una sola bobina por fase. La corriente en una bobina debe invertirse para revertir un polo magnético. Hay dos conductores por fase, no son comunes.
La diferencia es: "Unipolar y Bipolar bobina media, porque estamos utilizando menos vueltas, no nos da gran velocidad bajo el par, pero debido a la baja inductancia, dirige el par a altas velocidades.
Serie bipolar utiliza la bobina completa por lo que da muy buena velocidad bajo par. Pero debido a la alta inductancia, el esfuerzo de torsión cae rápidamente.
Bipolar paralelo también utiliza la bobina completa por lo que da rendimiento de buena velocidad baja. Y su baja inductancia permite el par al ser sostenido hacia fuera a altas velocidades. Pero recuerde que debemos aumentar actual en un 40% para conseguir esas ventajas. "




 - Arduino basado (GRBL)")








