Hola desde Francia!
Mi nombre es Mic
Lo siento por mi inglés (:
Mi propósito un Bot muy pequeño
Un poco más fácil para construir robot podemos tener paciencia y una buena magnifyingglasses,
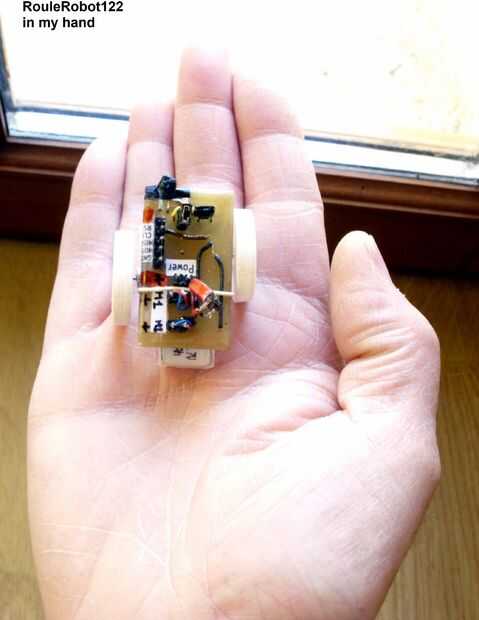
Su nombre: Roule_Robot
Su nikename: RR:
Peso de encintado: 14gr
Dimensiones: 39 x 22 mm
los componentes necesarios:
Un ATtiny13 SOIC
2 micro voltios 3 motor 6mm longitud 12mm de diámetro (hay en ebay)
2 transistores PNP smd 600mA
2 condensador de smd de 100 nF (1206 o 0806)
1 condensador de smd de tántalo 22μf
Resistencia 2 smd 6,8 K
2 resistencia de smd de 10K
1 smd LED rojo
Un CQY37N de 2 m m IR LED
Un sensor infrarrojo IS471F
Una hombre tira de SIL
Una batería LiPo 3,7 v 70 mA
ruedas con las tapas de la caja tabletas
que se pegan con pegamento o araldite cyanolite, acaba de poner en el extremo del eje y se
cuidado no fluye en el motor si no
motores y la batería son piezas de repuesto para Mini Helicopteros
El PCB es doble cara pero esto evitaba por método de direccionamiento en el costado del componente con
teléfono de cable
debe también limpiar la placa con acetona una vez terminado las soldaduras.
Nota: la programación se realiza directamente en BASCOM ISP
hay que quitar el puente SW1 (si no el barco no se reconoce al azar)
y se recupera de la operación del sensor IR
Programación:
versión demo de BASCOM abril
el programa es sencillo y hay espacio en la memoria de destello
es también theATtiny13 y dos puertos
y podemos agregar luces por ejemplo.
El archivo ZIP contiene todos los pcb hecho â â con Kicad y componentes 3D â â con Wings3D
imágenes de PCB 3D son de renderizado 3D captura de pantalla de kicad
KiCad wings3d y son ambos freeware






")






