Paso 3: El programa y programación...
Ahora vamos al programa:
quitar el puente SW1 prog para aislar el sensor de infrarrojos durante la programación
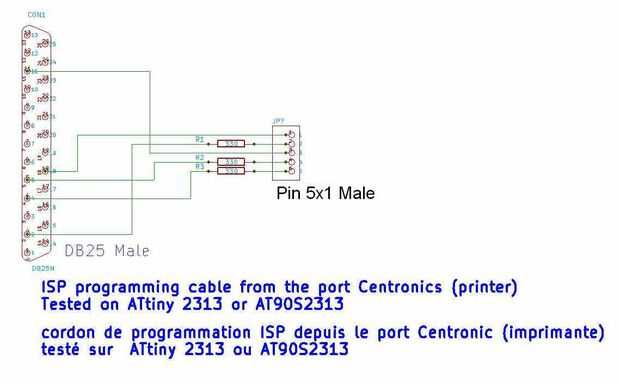
conectar el programador ISP (seguir la secuencia del perno)
Vea a continuación el tipo de control
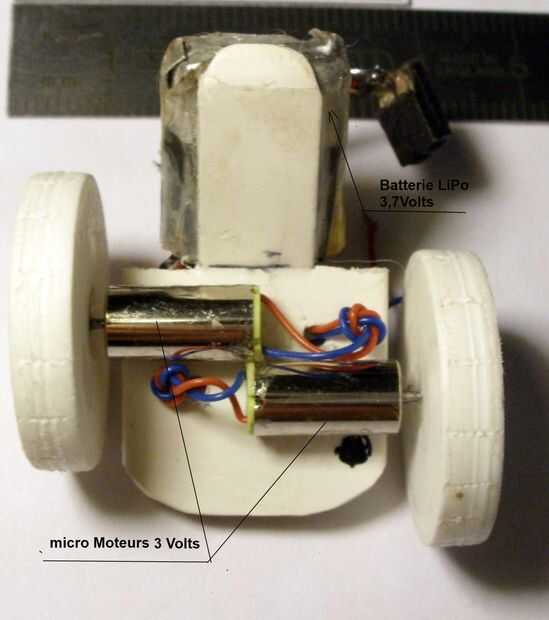
Conecte la batería de LiPo (ver polaridad!)
Archivo Robot.hex Roule es uno que deberá cargar en el microcontrolador ya compilado allí es más que cargar en la memoria flash
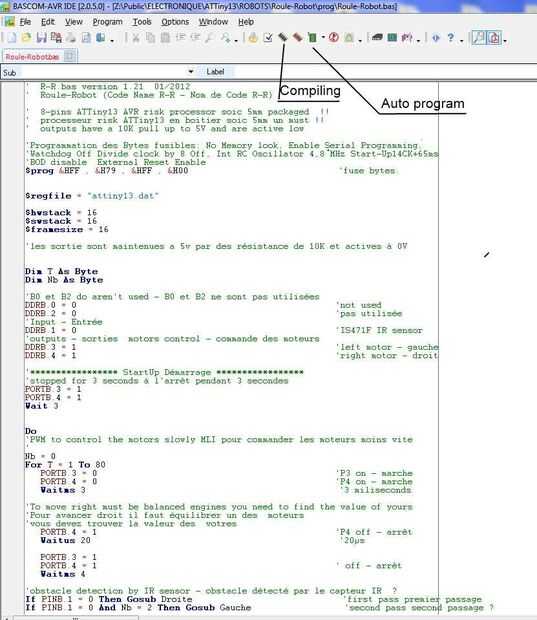
Inicio BASCOM AVR (usar la demo versión es suficiente)
Cargar el programa Roule-Robot.bas (si desea cambiar el programa según su gusto)
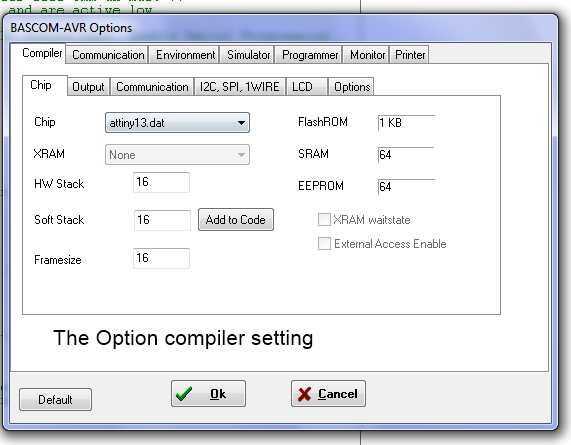
entonces configurar el chip de la siguiente manera:
ATtiny Seleccione con el botón dat nave
ir al menú opciones y luego compilar y enviar
e introduzca los siguientes valores:
Pila de HW 16
Pila de suave 16
optimizado a 16
en el menú del programa puede seleccionar un programa alternativo como STK200/STK300 si tiene este tipo de programa o hacer uno como que'jai la imagen adjunta, o mejor, utilizar un programador USB.
Luego ir al menú (icono verde) chip programa o pulse F4
la nave es conocida normalmente, si no reconocida, haga clic en el icono verde (siguiente al último en la parte superior derecha) luego ir al menú de bloqueo y fusibles Bits
Fusebit apagar F
E Fusebit de
DCBA Fusebit de 1001: int, RC Osc 4.8 MHz; Inicio: 14CK + 64 ms
ATENCIÓN sobre todo, no para cambiar los fusibles y otros no seleccione un oscilador externo
de lo contrario no es posible comunicarse con la nave así que programa, vea la pantalla de disparo fusibles.
Ahora el FlashROM, haga clic en y haga clic en el icono verde en la parte superior de la programa de Auto envío
Normalmente todo debería estar bien y después de comprobar que Bascom muestra OK en la parte inferior de la ventana
Si es el caso del pa s comprobar todo incluyendo el PWB y comenzar de nuevo.
Luego desconecte el batería desconecte reajuste el temporizador SW1 pro en su lugar y
Rollo de robot está listo para montar :)
Elija un terreno limpio, plano y liso conectando la batería que tienes 3 segundos para acabar con RR en el flore
También puede probar el detector IR, pasando su mano antes de que el LED rojo debe encenderse,
Si el LED rojo permanece encendido continuamente, dos posibles causas:
1 una batería es plana
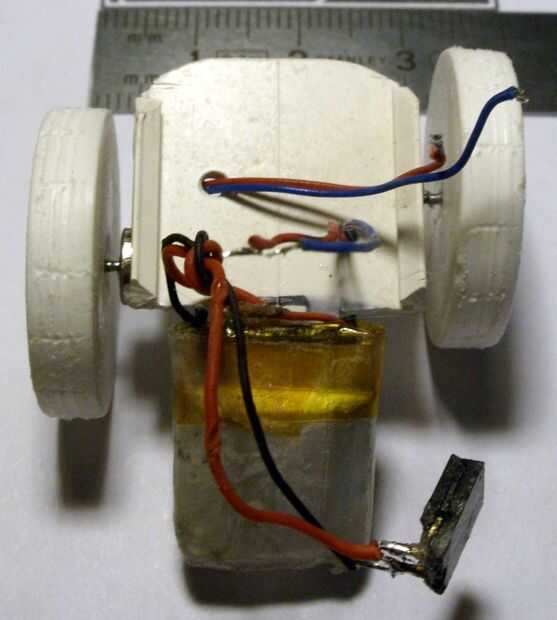
2 radiación de LED IR por la vía la parte posterior para evitar esto, pegué la cinta negra en ella.
Actualización 07/2015 KiCad con cremallera (SMD con cambios menores) y archivos de versión DIL son comunes:
ver el video:
: Pasar un buen rato! :)
algunos enlaces:
KiCad:http://kicad.sourceforge.net/wiki/Main_Page
Wings3D:http://www.wings3d.com/






")






