Paso 10: Conexión a
Si usted está usando el código proporcionado deberá conectar los servos y el sensor como sigue.
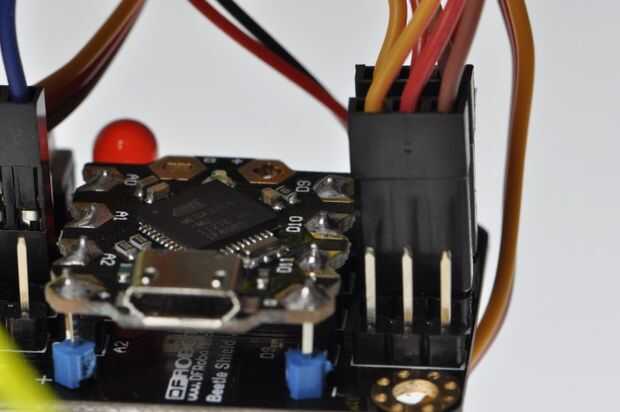
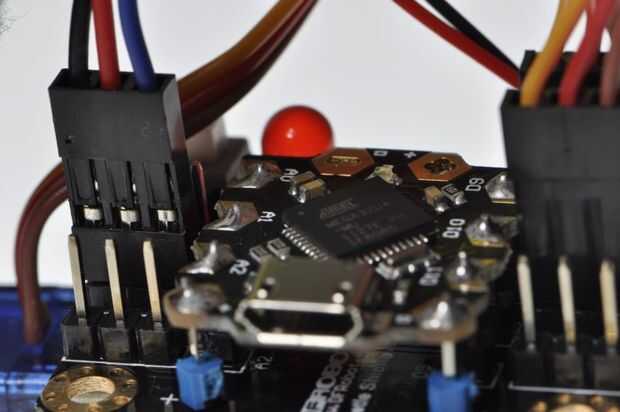
Conecte el cable de servo delantero de D9 en el PCB y el servo trasero con D10.
Asegúrese de que el cable amarillo es hacia a la Junta de escarabajo en el centro de la placa.
Conecte el enchufe blanco del cable del sensor con la toma de corriente en el sensor y el conector negro con conector A1 en el PCB. Este cable debe conectarse con el cable azul hacia el escarabajo en el PCB.
Para asegurarse de que tienes el cable adecuado consulte la Wiki http://www.dfrobot.com/wiki/index.php/Insect_bot_mini
La última tarea es conectar la batería con los pines de la batería en el PCB. Asegúrese de que el cable rojo está conectado con VCC y el cable negro está conectado con tierra. Después de presionar el interruptor para encender el robot, deberá encenderse el LED de la PCB.













