Paso 3: Vacío Robot


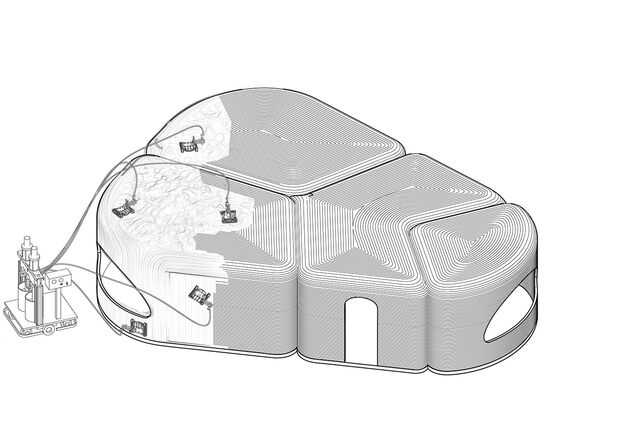
Otra limitación importante de las técnicas de fabricación aditiva de hoy está ligada a la naturaleza unidireccional de la orientación de la capa, creando una debilidad inherente. Fabricación aditiva permite heterogénea distribución optimizada de la materia. Para sacar provecho de esto y no sucumbir a esta limitación, hemos utilizado herramientas de optimización estructural para crear una segunda capa de material sobre la cáscara. El material está alineado con la dirección de tensión, finalmente optimizar la orientación y grosor de la estructura de la cáscara. Los datos derivados del análisis estructural se traducen luego en caminos para el tercer y último robot, el Robot de vacío. Utilizando un generador de vacío este robot se adhiere a la superficie de la estructura previamente impresa. Moverse libremente sobre la cáscara primera sobre sus pistas, depositando el material en la superficie de la cáscara, mejorando sus propiedades estructurales. Esta tarea puede realizarse por un robot, o un enjambre de robots trabajan en coordinación.
Consultar documentos a continuación:
http://Link.Springer.com/article/10.1007%2Fs10846-013-9820-z#Page-1
http://Jin-Shihui.com/minibulders/Schmidt12.pdf
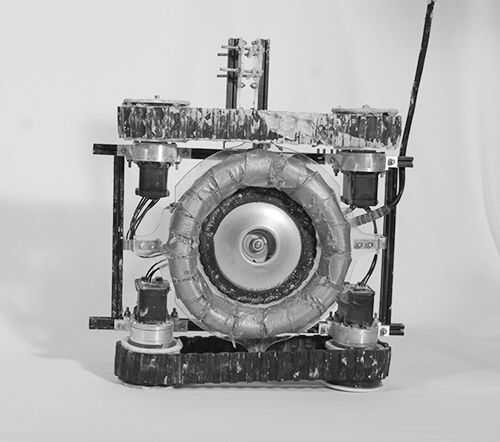
El tamaño del robot de vacío 30 * 27 * 12 cm, pesa 2,1 kg
Herramientas y materiales:
-Makerbeam
-Dynamixel ax-12 servos * 4
-Cinta adhesiva plata
-Smoothon 00-10(softest) de silicio Ecoflex
-aspirador de mano ciclón 700w. Se utilizó la base.
-Espuma para el fresado de CNC
-4 m m de acrílico de corte por láser
-Motor, eje y ruedas de montaje (aluminio o 3d impreso)
-Orugas de goma
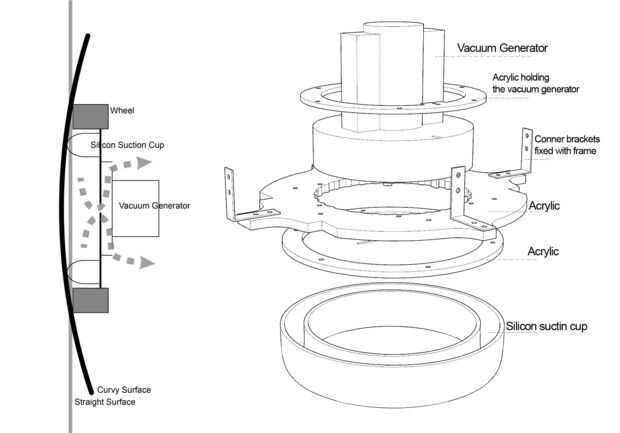
La estructura del robot es similar al primer robot, un montaje de aluminio afijos los motores y el mecanismo de la rueda al chasis. Mientras que el generador de vacío está atornillado a la estructura. El generador de vacío extrae el aire debajo del robot y una copa de succión flexible sella la superficie irregular. Presión negativa en el espacio entre la ventosa y la superficie adhiere a la pared de escalada robot para superficies verticales y horizontales. Para dar la movilidad del robot sobre superficies curvas doble, la taza de la succión debe ser ajustada para ser más baja de las pistas (aproximadamente 3 mm). La estructura del robot debe ser lo más rígida posible y la taza de la succión debe ser lo más suave y maleable posible. Existen otras soluciones para permitir que las ruedas/pistas mantener siempre la tracción, como el uso de un sistema de suspensión pero encontramos esto para ser el más simple y más confiable.
La fuerza del generador de vacío debe superar el peso del robot. Por otra parte la energía/esfuerzo de torsión de los motores debe superar el peso total del robot, más fricción entre la ventosa y la superficie. Materiales de goma producen roce con otras superficies, especialmente cuando se aplica una fuerza. Experimentamos con muchas soluciones buscando un material como goma o recubrimiento para reducir la fricción. Se encontró una solución alternativa mediante la aplicación de una o dos capas de cinta de plata en la Copa de succión. Encontramos que esto reduce significativamente la fricción y demostrando ser más duraderos que los recubrimientos plásticos o lubricante. Sin embargo en la práctica que lentamente degradación de la capa de la cinta, era fácilmente reparable.
Para cierta curvatura (curvatura simple o doble curvatura) el tamaño de la rueda, la distancia de las ruedas son más pequeñas mejor, el peso del robot debe ser lo más ligera posible, taza de la succión más grande da más fuerza de succión. Así que hay un equilibrio entre el peso del robot y la potencia de los motores, tamaño de la taza de la succión y tamaño del robot.













