Paso 5: Extrusión de Material







El material utilizado por los robots debe exhibir ciertas propiedades, resistencia, fuerza de vinculación, tiempo de curado y bajo costo. Tiempo de curado es particularmente crucial para permitir que el robot viajar en la parte superior capas previamente impresas, manteniendo la integridad estructural. Para la estructura final se utiliza una mezcla de 40% Axon Easymax dos componente polímero junto con el polvo de mármol de 60%. Cada capa es de 6mm y 16mm de ancho. Las capas están unidas a convertirse en una cáscara uniforme cuando está curado. Curvatura de Shell confiable puede llegar hasta 90 grados con un radio de 30cm. También es posible aumentar el porcentaje de polvo de mármol sin pérdida de propiedades mecánicas. Sin embargo a medida que la viscosidad del material aumenta la cantidad de presión necesaria para mover a través de tuberías también aumenta, que a su vez dificulta control de flujo de materiales.
Después de mezclar el polvo del mármol con el polímero componente A y B, cada una se almacenan por separado en tambores sellados. Estos mixtos material pueden ser almacenados un mes fiable siempre y cuando el polvo es sin humedad cuando se mezclan.
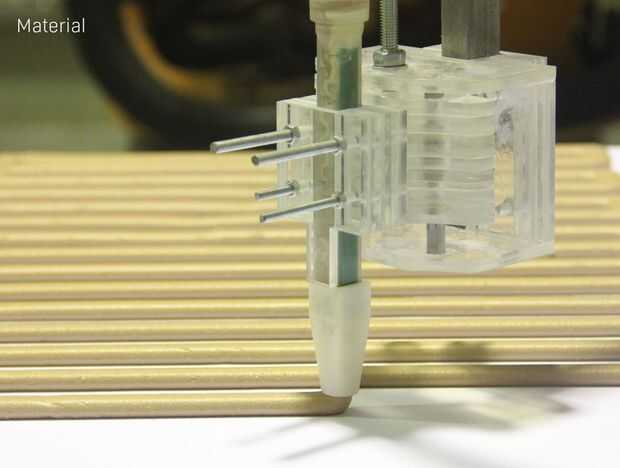
Al imprimir en sitio nos utiliza un extrusor de polímero de dos parte profesional. Fue sacado a la ración 1:1 a través de tuberías de alta presión, conectada a un bloque de mezcla personalizado que a su vez se conecta a la boquilla desechable mezclador estático. La boquilla está conectado al robot y curado en 2-3 minutos, que pueden acelerarse químicamente o mediante calor.
La extrusión también es móvil, considerado como "el cuarto robot" suministra material, alimentación, controladores, panel de control del calentador y panel de control de flujo de extrusión. El cuarto robot sigue los pequeños robots durante la impresión demostrando dos niveles de movilidad dentro del sistema.
Notas:
Las imágenes incluidas en este documento pueden mostrar diferencias debido a la creación de prototipos que constantemente fue evolucionando el sistema.
Hemos intentado hacer los robots tan abierto como sea posible al compartir las especificaciones en este artículo científico.
http://arXiv.org/FTP/arXiv/Papers/1406/1406.3400.p...
El proyecto también ha aparecido en varias publicaciones, vea abajo para más información.
Economist.com/blogs/Economist-explains/2014/07/Economist-explains-13
Wired.com/2014/06/These-drones-Could-3-d-Print-Your-Next-House/
creativeapplications.net/Environment/minibuilders-Small-robots-x-large-Sculptures/
Créditos:
Equipo de investigación: Stuart Maggs, Dori Sadan, Cristina Nan, Jin Shihui
Facultad: Sasa Jokic, Petr Novikov
Proyecto por: Instituto de arquitectura avanzada de Cataluña
Patrocinado por: empresas de SD













