Paso 3: "respuesta a la luz"
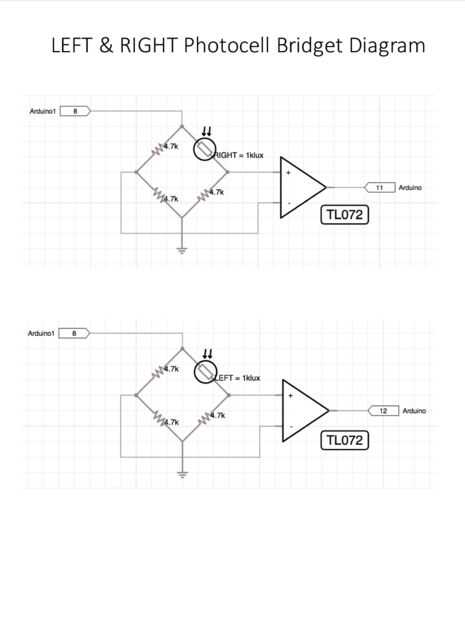
La base de la "reacción de la luz" son las fotocélulas. Las fotocélulas (que son resistencias que varían con la luz), se conecta en configuración "Whitestone Bridge." Un cambio en la intensidad de la luz causa un desequilibrio del puente resistivo, que llevó a la saturación de un amplificador operacional. Se utilizaron dos fotocélulas, uno delantero y uno trasero. La acción es simple cuando el robot se mueve hacia adelante y la luz se detiene, los motores de dan "marcha atrás". Y por supuesto, vicio y viceversa.
Otro punto muy importante, es el uso de un "bloque de poder", porque en vez de constantemente tener poder sobre el puente, la fuente es conseguida a través de un pin de salida del Arduino. Sólo cuando es necesario comprobar si el sensor, 5V se produce momentáneamente por Arduino, alimentando así el puente solamente durante la "ventana de lectura" (en este caso, el pin 8).



")
")




 Stage1Model2")

")

")