Paso 4: "la generación y la respuesta al sonido"
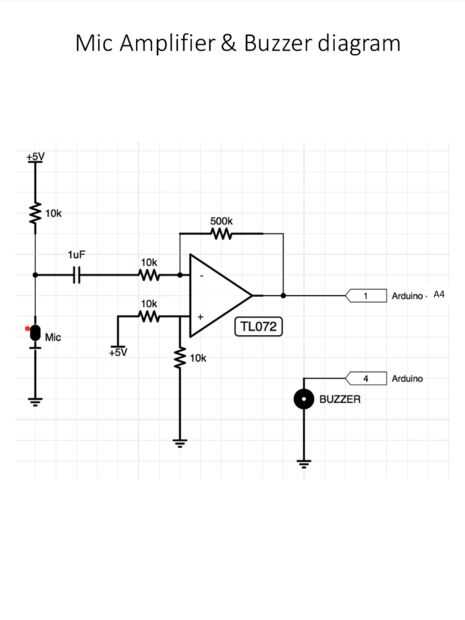
Para que el robot podía "oír", fue elegido un viejo micrófono de la PC. Como la señal de micrófono es muy baja, un amplificador operacional (inversor) fue utilizado para la amplificación de la señal. También, antes de ser amplificada, la señal de audio pasa por un filtro de paso alto, eliminando el componente de DC.
Para "hablar", fue usado un simple "zumbador".



")
")




 Stage1Model2")

")

")