Paso 7: Software
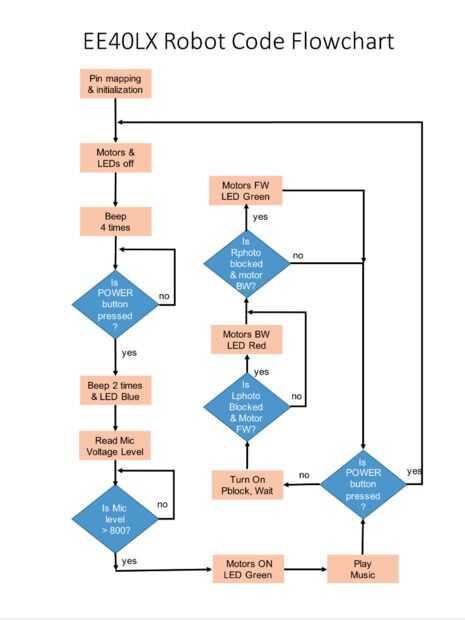
La idea detrás de la SW es muy simple. Cuando activado, el robot genera 4 pitidos y permanece la señal "ON" del mando a distancia. Al recibir, suena 2 pitidos, el LED se volvió azul y el robot está listo para el comando de sonido, o medios, un ruido más pronunciado como un silbido o una palmera (la ganancia del Op Amp, debe ser probado para generar una señal coherente). También es importante que durante la "fase de instalación", para "escuchar" el nivel de ruido ambiente para compensar, lo que traducirá en mejor sonido exactitud ayudando a el robot no reacciona con cualquier ruidito.
Con el comando de sonido, el robot comienza a moverse hacia adelante y encienda el LED verde hasta que se bloquea la luz del sensor delantero. En este momento, el LED vuelve rojo y el robot se mueve hacia atrás en la "marcha atrás" hasta que el sensor de luz trasero se bloquea, invirtiendo así el movimiento. Recibir el robot continuo en aquellos movimientos hasta que un comando para detener (control remoto). El código de Arduino actualizado puede encontrarse en GITHUB:
https://github.com/Mjrovai/MJRoBot-I
o en el archivo de abajo:



")
")




 Stage1Model2")

")

")