Paso 2: Iniciar hacking
Ahora tienes que comprobar algo: buscar cualquier condensadores conectados directamente a los pines de cada motor se puede ver. Si hay un tapón en un motor, es muy probable para todos ellos tener uno. Los que están allí para reducir al mínimo el ruido proveniente de los motores.
Sin embargo, si utiliza un tablero de regulador del motor, que tiene la limitación de corriente, necesita sacar los tapones. Actúan como cortocircuitos en el arranque, cuando están en estado de descarga. Se pueden acortar, o se puede quitar muy bien con un soldador, es usted.
Para quitar los de los motores de controlador de pista, debe sacar la tapa de la caja de cambios, sacar el motor, quite las tapas y poner todo nuevo. Tengo que decir, poner el motor en su lugar no era demasiado fácil, aunque perfectamente con el plástico.
Recorte las tapas restantes es fácil, no tienes que lidiar con ángulos revirados, o soportes motor raros.
Bueno, los casquillos son, lo siguiente que es hackear en nuestro controlador de motor con el imp en él.
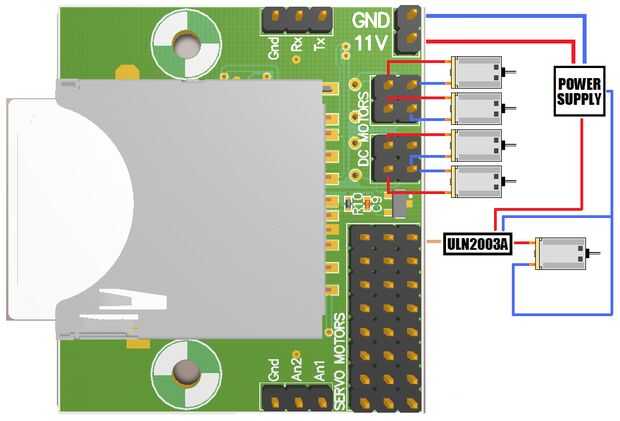
Las cabeceras de perno de Junta están marcadas en la capa de serigrafía, se pueden identificar fácilmente los pasadores motor DC. Usted tendrá que conectar sus motores DC a aquellos, o los pernos equivalente en su tablero de regulador del motor. Hay motores de corriente continua sólo en mi tanque, el cableado no era muy difícil de averiguar. Poner unas piernas de resistencia en los orificios 0,2" encabezado y había conectado con un cable a la hembra a las salidas de CC.
Desde que tuve cinco motores en mi tanque, tuve que añadir un buffer ULN para el quinto. Estas son hechas realmente para steppers, pero son tan buenos para motores de corriente continua así.
El motor que hace pasar el tiro es el único que necesita para girar sólo en una dirección, opté por para ser el impulsado por la Junta de LSN. He modificado el código de un servo salido a dar una constante de '1' o '0' cuando el control de la C# aplicación EFS así y conectado a un ULN de entrada. El motor de tirador fue atado entre la correspondiente salida ULN y el suelo.
El buffering es necesaria, porque los servos pueden proporcionar corrientes solamente hasta 20mA, pero nuestro motor DC obviamente atrae más.
El ULN2003 tiene una corriente nominal de salida de 500mA de salida cada uno, que es más que suficiente para nosotros.
La tarjeta controladora de motor debe ser alimentada para que funcione. Tenía una batería de 9.6V en el tanque por defecto, que usé para mi tablero de regulador, que tenía un consraint de voltaje de alimentación: Vin debe ser bajo 11V.
Si tienes unclarities acerca de las conexiones que deben hacerse, por favor consulte la imagen de este paso.









")



