Paso 3: unas palabras sobre el tablero



Servos
¿Lo que necesitamos saber sobre Servomotores? Bueno, generalmente tienen un potenciómetro en ellos para regeneración y una caja de cambios para mayor torque. Servos de pequeño proyecto DIY muy a menudo se limitan a un determinado ángulo de giro, la mayoría de las veces por el potenciómetro.
Servo motores requieren una periódica squarewave de 50Hz, con ancho de pulso variable, cambiar su posición. Sin embargo, si la señal cae hacia fuera, el servo permanece en la posición a la que fue enviado última vez.
La anchura de pulso es una variable que difiere de un servo al servo. Tengo un servo, que necesita un impulso de milisegundo 1 a la extremidad izquierda y un impulso de milisegundo aproximadamente 2.5 a la máxima posición. La longitud de impulso puede ser calculada usando la ley de tres.
La señal base de 1 milisegundo es necesaria, pero no cambia la posición de cualquier manera. Así que vamos a ver este como 1 ms offset.
Supongamos que queremos girar el eje a 75 grados. Sabemos que estos:
Max girar a ángulo = 180 grados
cambio de anchura de impulso = 2.5-1 = 1.5
180 grados... 1,5 ms (1 ms offset no tomada en cuenta!)
75 grados... x ms
-----------------------------------------
x = (75 * 1.5) / 180 = 0,625 ms
Esta es la fórmula que tenemos que saber, cuando queremos posicionar el eje para un ángulo dado.
Motores paso a paso
Los motores paso a paso necesitan cuatro señales de servo amplificado. Esto es lo que la Junta de LSN fue construida realmente para. Conecte las salidas de servo a las entradas de LSN y el paso a paso a las salidas de LSN. Mira la tabla para ver cómo conseguirán activa las cuatro líneas.
La Junta apoya onda, paso completo y modos de accionamiento de medio paso, básicamente todo lo que necesita. El IC proporciona la forma de onda no es realmente un conductor de pasos especializados IC, así microstepping no es compatible.
No hay ningún límite actual integrado en el lado del controlador paso a paso.
Motores de corriente continua
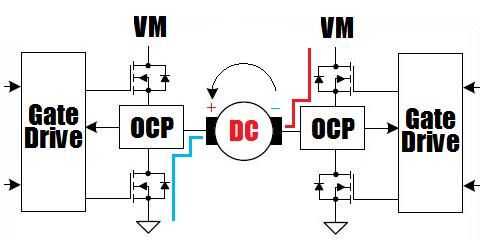
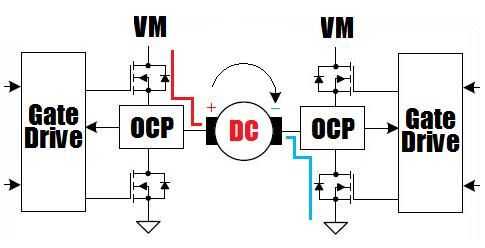
La forma más simple de los tres, creo. Hay cuatro puentes H integrados, cada puente tiene una entrada para la dirección y una entrada para la velocidad. La velocidad se varía cambiando el ciclo de trabajo de la señal que va en el pin de la velocidad.
Bastante simple, los motores DC tienen dos parámetros en nuestro caso: velocidad y dirección. Cambiar aquellos para controlar los motores.
Velocidad puede ser cambiada dando una señal modulada en su tren de potencia, dirección puede ser fijada al cambiar el carril de alimentación a que los pernos motor ir. Se refieren a las imágenes para obtener un ejemplo más visual en control PWM modulación y dirección.
Cada uno de mis puentes puede entregar corrientes de hasta 1,5 amperios antes de que activa la protección de la sobreintensidad de corriente incorporada.
Mediciones de corriente se pueden hacer mediante el desarrollo del firmware para el imp: medidas AD en un derivador conectado en serie con la parte baja del puente de H puede dar una idea de cuánta corriente está fluyendo. Corriente es directamente propotional con esfuerzo de torsión, por lo que se puede obtener un valor aproximado par así.
A lo largo del desarrollo, accidentalmente algo reinventado: conectar el pin PWM a 'alto', y PWM modulan la señal que va al pin de dirección. Usted conseguirá control PWM y la dirección mediante el control de un solo perno.
Dando un 50% señal de ciclo de deber de perno de dirección hará la parada del motor (gira a izquierda igual mucho girar a la derecha, por lo que va a ninguna parte desde un punto de vista), cambiando el ciclo de trabajo de baja y alta tendrá como resultado el motor girar izquierda/derecha.
Lo malo de esto es, que hay consumo incluso cuando el motor no se mueve. También perdemos un pedacito de la resolución.
Cuento largo: esta es la tabla decidió utilizar para el control de la IMP es opcional, esto puede ser incorporado en cualquier tipo de sistema y ser controlado vía I2C.
También he tenido la placa de puente H L298 tipo ebay, pero que puede tratar con solamente 2 motores y necesitaba 5. Por no mencionar el espacio el puente de ebay se come :)
Si tiene alguna pregunta sobre el tablero de regulador del motor que decidí usar, usted puede pedir en un comentario!
Vamos a ver cómo podemos controlar la Junta a través de la IMP y una pequeña aplicación en C#!









")



