Paso 1: Paso 1: establecer la mecánica
Primero necesita tener estos objetos listos para ir:
- Arduino Uno
- Arduino al adaptador del USB (datos habilitados)
- 3 x masculino a los cables del puente femenino (m2f puentes)
- 4 x cables de macho a macho puente (puentes de m2m)
- batería de 9 voltios (opcional)
- 9 voltios de DC adaptador para pila de 9 voltios (opcional)
- doble cara cinta o tiras de comando
- Ultrasonido Sensor de proximidad (y adaptadores que ven con él)
- Motor servo
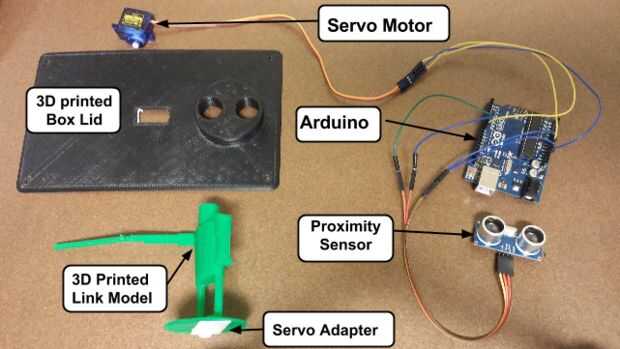
Si hemos establecido la mecánica en primer lugar, será más fácil de programar e instalar en el recinto más adelante.
Usted necesitará tomar los 4 puentes m2f y enchúfelos en el sensor de proximidad. Entonces conecte los puentes restantes de m2m 3 3 ranuras terminal del motor servo. Estas ranuras son asignadas por los cables de color naranja, rojos y marrón. Conecte un cable a cada una de estas ranuras. Ahora, todo lo que necesitamos hacer es estos dos objetos de alambre en el Arduino para que pueda recibir datos desde el sensor y transmitir datos al servo.
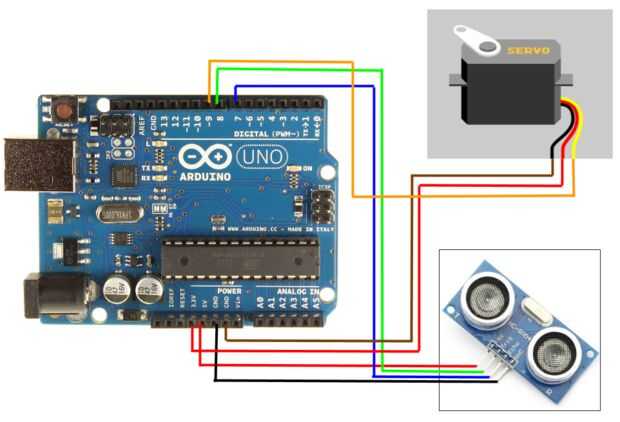
Hay un detallado circuito diagrama adjunto.
- Para el sensor de proximidad:
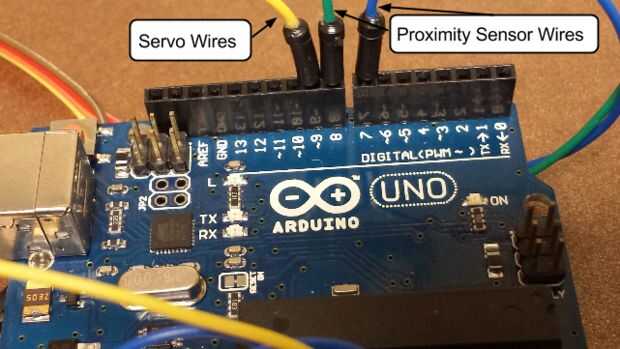
- Conecte el cable proveniente del terminal con la etiqueta "trig" en Puerto 8 de Arduino
- Conecte el cable proveniente del terminal con la etiqueta "Eco" en el puerto 7 de Arduino
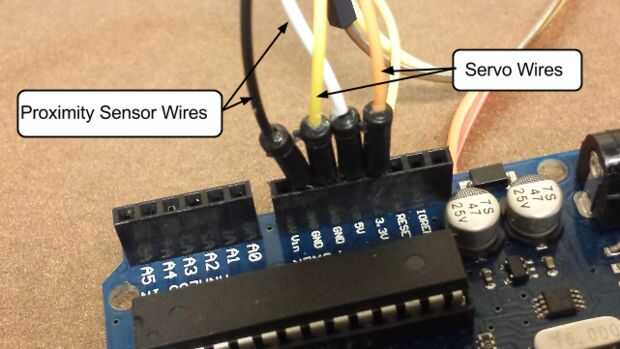
- Conecte el cable proveniente del terminal con la etiqueta "VCC" en el puerto 5V de Arduino
- Conecte el cable proveniente del terminal marcado "GND" en uno de los puertos GND de Arduino
- Para el motor Servo:
- Conecte el cable que viene de la ranura de cable naranja en Puerto 9 de Arduino
- Conecte el cable que viene de la ranura del cable rojo en el puerto 3, 3V en el Arduino
- Conecte el cable que viene de la ranura del cable marrón en el otro puerto "GND" en el Arduino
Cuando haya terminado, el sistema debería verse como las dos fotos.




")








