Paso 4: Paso 4: poniendo todo junto




Finalmente todos tenemos que hacer es poner todos juntos.
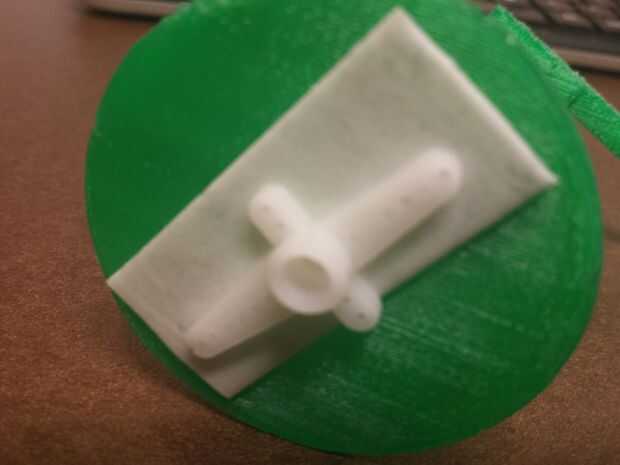
- La tapa de llenado
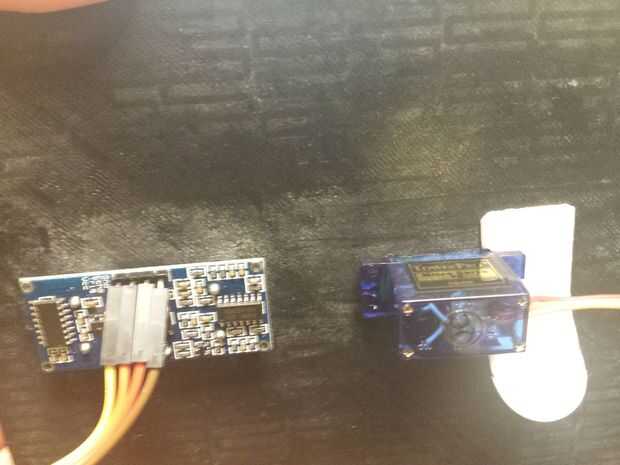
- Primero tomamos la tapa impresa 3D y ajuste el Sensor de ultrasonido en los dos agujeros pequeños en el área del cilindro levantado
- Cuando el Sensor de ultrasonido, asegúrese de no forzarlo demasiado porque puede tener errores de lectura más
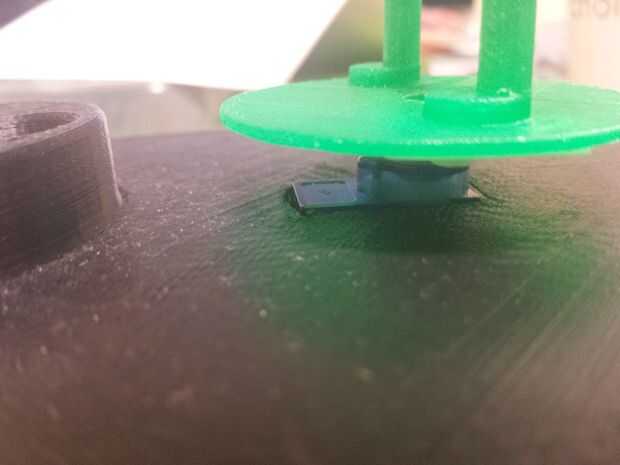
- Ponemos el motor servo en el orificio rectangular en el centro de la tapa
- Cuando estos dos componentes, se debe sólo sientan comodamente en agujero, sin embargo si los agujeros son demasiado apretados, utilizar un cuchillo pequeño para gradualmente abajo de los agujeros para los componentes. Si son demasiado grandes de agujeros, utilizar alguna cinta fuerte para mantener sus componentes caiga. Personalmente utilicé tiras fuerte de comando para mantener mi Servo motor en su lugar
- Puesto que el enlace tiene que caber en el Motor Servo, podemos utilizar los adaptadores en forma cruzados emanado por el motor servo con.
- Tomar uno de los adaptadores y poner a un lado de la cinta de doble cara o una tira de comando en el adaptador. Asegúrese de que pega bien
- Tomar el otro lado de la cinta o tira de comandos y pegarlo a la base del modelo de enlace. Preferiblemente en el centro del modelo para permitir la eficiente par
- Si tienes una batería de repuesto de 9 voltios DC adaptador de 9 voltios ahí usted puede usar este poder el Arduino
- Simplemente enchufe el adaptador de 9 voltios
- Luego conecte el adaptador en el arduino
- Esto debería poder arduino por muchas horas
- Te recomiendo que uses un adaptador con un interruptor por lo que puede cambiar el modelo de encendido y apagado para ahorrar energía
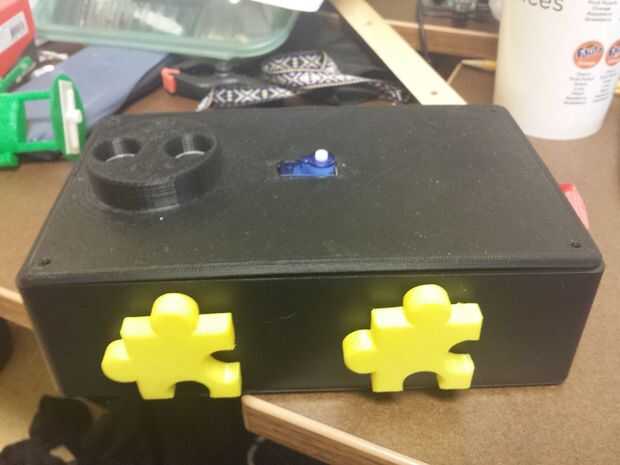
- Ahora que tenemos todos los componentes juntos, ponemos el Arduino en la caja con todos los cables a los sensores del motor y proximidad de servo por encima de él.
- Asegúrese de que el arduino está conectado a la batería o el adaptador USB.
- Coloque la tapa encima de la caja
- Utilice tornillos para sujetar la tapa a la caja en los 4 orificios de esquina siempre
- Luego coloque el modelo de enlace en el motor servo, asegurándose de que el adaptador esté conectado firmemente en la cabeza del servo




")








