Paso 2: Modificaciones para servo






Quitar los 4 tornillos que sujetan el servo juntos y quite el tablero de control y potientiometer. Con cuidado retire el engranaje de la impulsión final, observando la disposición de los engranajes (una foto ayudará Si olvidas). Quitar el pasador en el engranaje de la impulsión final, ver Instructable. Se requerirá de prueba para montar la espiga de 3/16" en el agujero donde estaba el árbol de potientiometer, un poco de lijado alrededor de la circunferencia de la espiga. La espiga debe encajar a través del orificio y alrededor de 1/8" sobre la parte superior del agujero. Con una navaja o cuchillo del Exacto, forma el extremo de la espiga para adaptarse perfectamente a la ranura en la parte inferior de la unidad de engranaje (donde el eje de potientiometer utilizado para caber). Prueba de que el pasador puede mover el engranaje sin demasiada fricción. En el interior de la caja del servo, marcar con una línea de lápiz en la espiga del pasador puede cortarse-el pasador debe extenderse sólo en el caso 1/8" cuando se corta. Cortar la espiga lo más recto posible, entonces el imán de epoxy en. Después de que el pegamento esté seco, limpie la ranura de engranaje de la unidad con un palillo o similar y deje caer un poco de epoxy en la ranura. Poner el pasador y el imán en el agujero y alinear de tal manera el imán sigue siendo lo más recto posible cuando se gira el engranaje final (no tiene que ser perfecto). Deje que se seque.
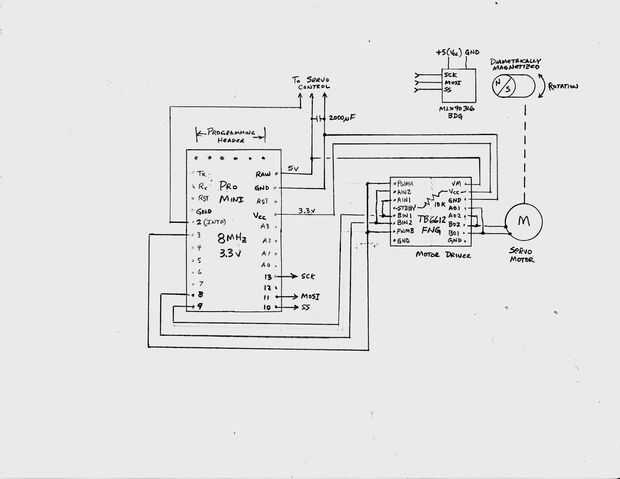
El MLX90316 sobre el tablero de adaptador, agregando los condensadores como cerca o en el tablero tal como lo recomienda la ficha técnicade la soldadura. Conecte los hilos entre el Mini Pro y el sensor según el diagrama del circuito de prueba. Pegamento caliente lo MLX90316/adaptador de junta para la tapa del servo inferior, para obtener una distancia de 1/8" a 1/4" entre el sensor y el imán con la tapa montada. Comprobar el funcionamiento del captador con el esbozo de prueba del sensor de Arduino. Con una fuente externa de motor de 3 a 5 voltios, las lecturas del sensor se deben mover constantemente en el monitor serie del Arduino.
Completar el cableado del Mini Pro para el conductor del motor y el motor por el esquema del circuito final. Pegamento caliente del Mini Pro y controlador de motor hacia el exterior de la caja del servo.
Programa el Mini Pro con servo_mod_MG996R_PID.ino bosquejo; Usted puede temporalmente un comentario algunos del código de salida serie para ver la gama actual de tu dispositivo. Si obtiene valores diferentes del código en el bosquejo, sólo sustituir sus valores en lugar de otro. Acción servo mediante un comprobador de servos o su propio controlador de prueba y comparar la gama a un servo estándar. También se puede ajustar el rango de salida si lo desea en el bosquejo (en la función de mapa).

")











