Paso 1: Preparar los componentes
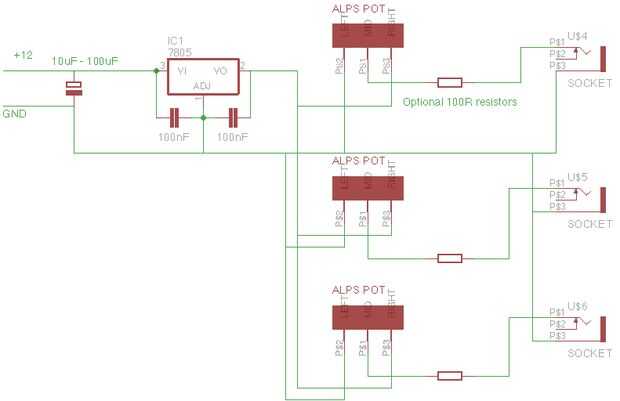
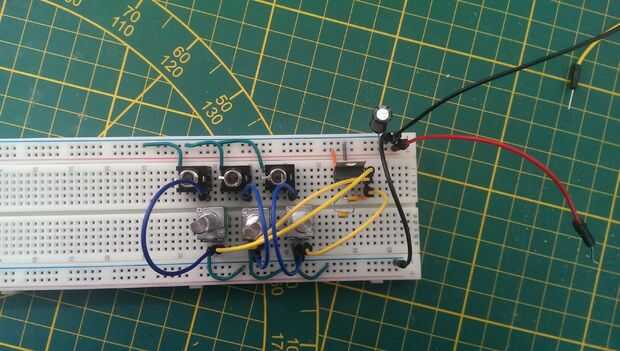
Si no has trabajado con electrónica a menudo recomiendo construir el circuito en un protoboard primero. Para que sepas cómo está construido.
De lo contrario:
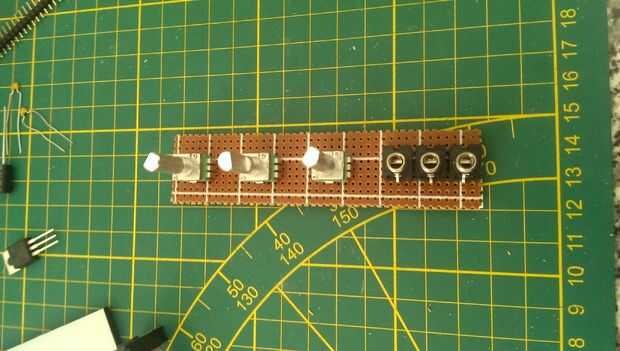
-Tome un pedazo de perfboard y cortarlo al tamaño correcto (Si utilizas un cuchillo de corte, puede cortar un par de veces y luego romper el perfboard). Corté a la medida de 6 caballos de fuerza, que es de 1,2 pulgadas o 30,48 mm (1HP es igual a 0,2 pulgadas). Más info sobre esto aqui: http://www.doepfer.de/a100_man/a100m_e.htm
-Colocar los potenciómetros centrada y de una manera para que tengan algo de espacio entre ellos. Lugar la toma de la misma dirección.








 con pfodApp")




