Paso 2: planificación
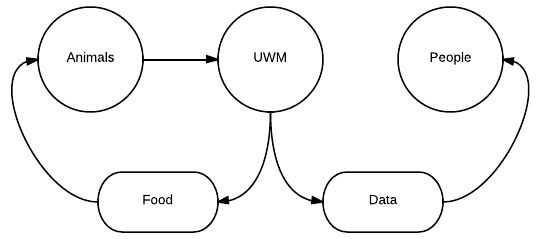

Para empezar, había planeado el bucle de interacción básica de nuestro proyecto y llegó a la conclusión que queríamos dos diferentes sensores (uno para la detección de aves y uno para la detección de las ardillas) y un alimentador servo-operada. Hemos probado muchos tipos de sensores, incluyendo un sensor de movimiento PIR, un sensor de proximidad, un flex sensor, un sensor de movimiento, una fotorresistencia y una almohadilla de presión.
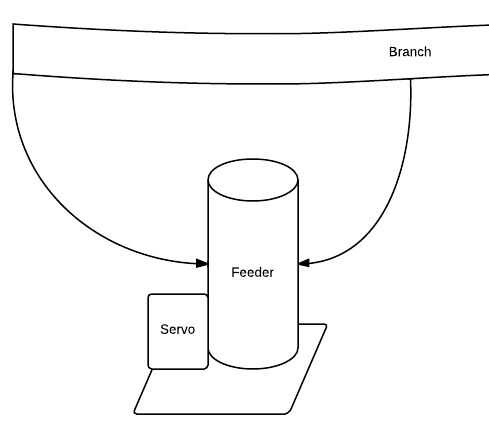
Durante este proceso, utilizamos una ardilla peluche con el peso correcto y ligero de la mano gestos para imitar a nuestros animales de destino. Al final, llegamos a la conclusión que un pad de presión con un umbral de peso lo suficientemente alto para eliminar pájaros sería lo mejor para la detección de las ardillas y un fotoresistor apropiada sería mejor para detectar la presencia de aves. También probamos varias botellas diferentes y diversos métodos para ayudar a definir nuestro diseño de comedero para colgar.
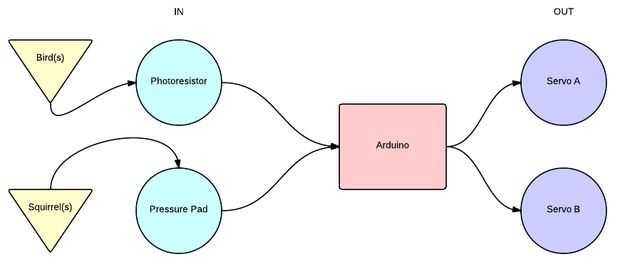
Finales entradas y salidas:
Entradas:
Ardilla -> almohadilla de presión
Aves -> foto resistencia
Salida:
Servo -> distribuye alimentos











")

