Paso 3: construcción







La UWM está diseñado para ser integrado en un árbol y por lo tanto no tiene mucho más que su forma física. Su cuerpo está compuesto de tres partes - el alimentador, el cerebro y los brazos.
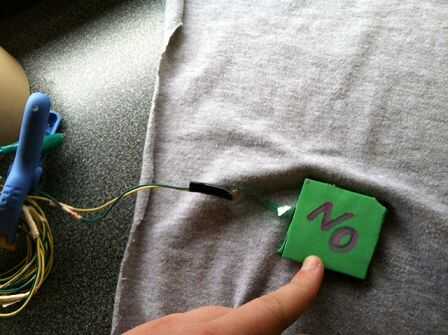
En primer lugar, hemos creado los brazos, o "núcleo" de la UWM mediante la creación de un cable de varios hilos - uno para alimentación de 5 voltios, para la tierra y tres controlar el servo, fotorresistencia y almohadilla de presión. Luego soldar cada uno de los componentes antes mencionados para su propio cable de 10 pies independiente y había conectado al cable. Esto nos permitió poner los sensores o servo independientemente en el árbol. Por último, mejoró el desempeño de la almohadilla de presión colocando espuma de artesanía a él y incrustar en la tela por lo que podría ser fácilmente atado a una rama.
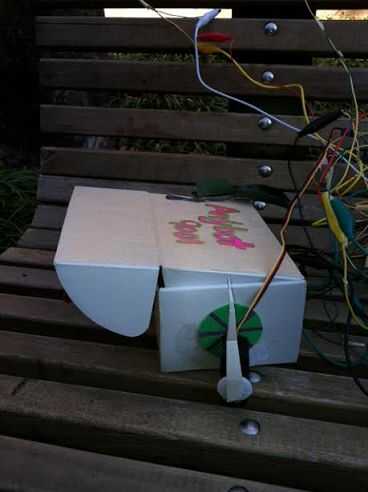
En el extremo opuesto del cable, atamos cada cable a un pin de cabecera que conectado en la clavija adecuada de Arduino. El 'cerebro' de la UWM consiste en una caja protectora cubierta de cinta adhesiva impermeable con un Arduino dentro. El Arduino alimentado por una batería de 9V o conectado a un ordenador portátil (un ordenador es opcional y puede recopilar datos adicionales, pero no es necesario).
Alimentador de la UWM se compone de un revés de la botella, brazo de servo y un servo. El servo está situado cerca de la botella o unido a él, y el brazo, que hizo de cartón reforzado con plástico y unido con pegamento caliente, bloquea la boca de la botella. Cuando un sensor se activa, el brazo se mueve y permite que los alimentos a suministrar vía gravedad. Se cuelga con un soporte de metal envuelto alrededor de la botella y con alambre de metal.











")

