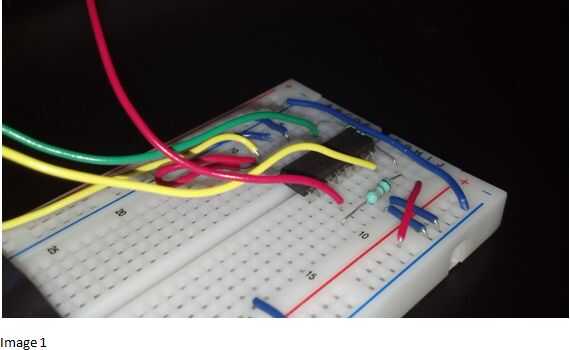
Paso 1: conexión
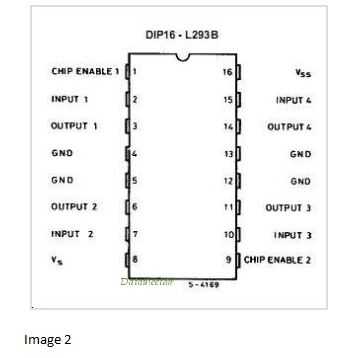
Para entender lo que significa el cuadro 2 describe cada uno de los pines:
• Pin 1 y pin 9 en estas actuales obras con el puente que conecta h, esto se puede extraer de los 5v con Arduino.
• Pin2, pin7, pin 10 y pin 15 son estos pines que controlan la velocidad del motor, que están conectados a una señal PWM de la placa Arduino. Pines 2 y 7 se utilizan para controlar el mismo motor y los pines 10 y 15 son para controlar el motor de otros.
• Patillas 3, pin6, pin 11 y 14 son los pasadores que se utilizan para el funcionamiento de estos motores dan el poder para el motor giro pines 3 y 6 son para la alimentación y la tierra de un motor; los pines 11 y 14 se utilizan para la energía y tierra en el motor, no importa cómo está conectado esto y cambia las polaridades para girar hacia un lado o el otro motor.
• Pin 4 pin 5 pin 12 y pin 13 están conectados directamente a la tierra, que puede ser utilizada en la placa Arduino.
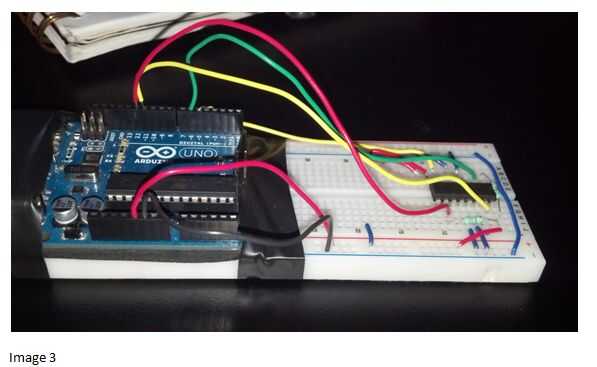
La placa Arduino se muestra en la figura 3.
Que contiene las siguientes conexiones:
Para alimentar el circuito de alimentación está conectado directamente al Cable de tierra para la tierra y otros 5v de Arduino para ofrecer.
4-pin PWM se utiliza para controlar los motores, que corresponden a los pines digitales PWM 5, 6, 10 y 11.
Y los motores se conectan directamente al puente h en consecuencia.



")









