Paso 4: Control
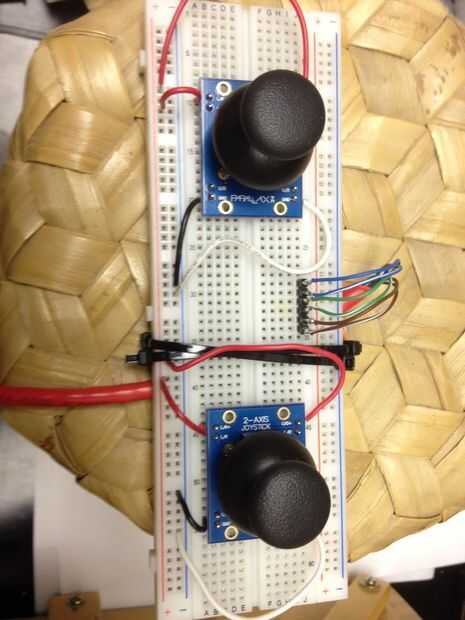
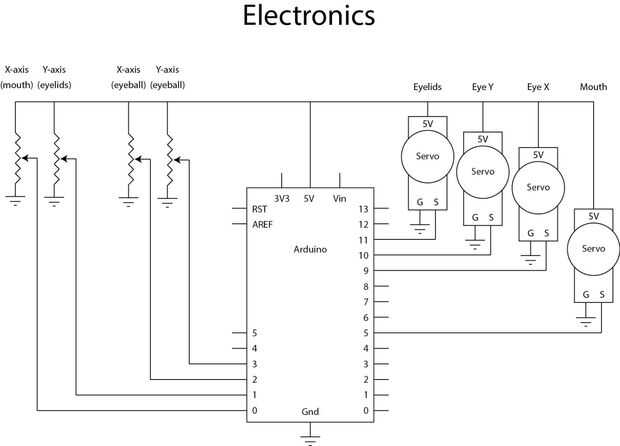
Conectamos todos los cables de alimentación para los servos usando un protoboard. Conectamos el conector de señal de cada servo a salidas digitales del Arduino (ojo eje x, pin digital 9; eje y ojo, digital 10; los párpados, digital 11; y boca, 5 digital). Utilizamos otro protoboard para armar un controlador. Un joystick de 2 ejes proporciona movimiento de ejes x e y del ojo. El segundo joystick controla los párpados y la boca. Nos unimos a las breadboards mediante un cable con los conectores quitados. La Junta de la palanca de mando conectada a las entradas analógicas del Arduino (eje x ojo, 2 analógicos eje y ojo, analógica 3 párpados, analógica 0; boca, 1 analógica).
Se utilizó el entorno de desarrollo integrado de Arduino para el software de control del programa. La biblioteca de control de servo integrado resultaron útil. El rango de los servos es de 0° a 180° que ajusta la gama de cada servo a un valor menor que el fin de evitar que los servos dañar el mecanismo girando demasiado. El código está disponible como accesorio.













