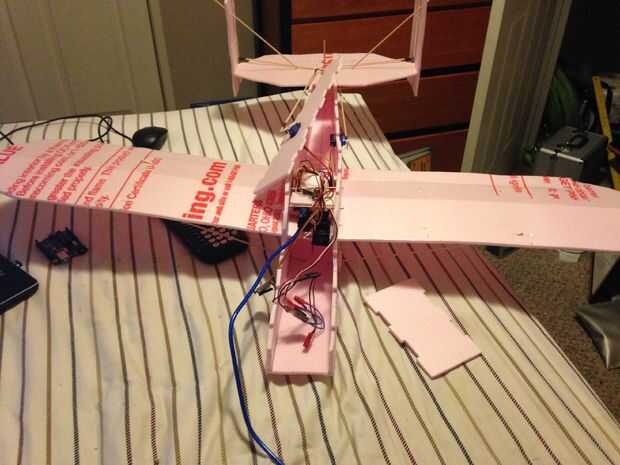

Actualmente estoy usando un filtro de Arduinomto un acelerómetro y usuario volar este avión. El código hace el avión volar constantemente con varios cambios de diferentes centro de gravedad. Acabo de recibir mi segundo Arduino en el correo, esto me permitirá poner a prueba mis leyes de control de vuelo adaptante. El objetivo de este dispositivo es permitir que un piloto para volar el avión normalmente en caso de una falla estructural. Mis pruebas iniciales del código ajustar sensibilidad y demostraron que automáticamente se mezcla controles para cancelar los efectos adversos, sin embargo tuvo un retraso de segundo trimestre en la salida. Para solucionar este problema estoy corriendo dos Arduinos en tándem, uno para el procesamiento de datos y otro para controlar los servos.
Este sistema permitirá UAV pequeño a ser más seguro, en caso de fallo que del sistema le permitirá al piloto concentrarse en conseguir el avión al suelo con seguridad.
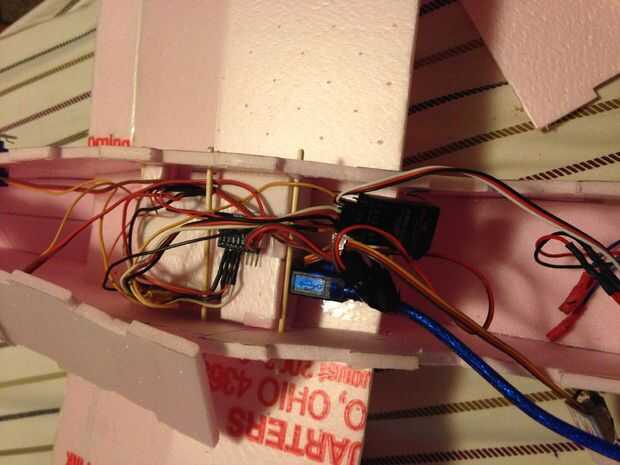
El listado de los cables;
1:6 canales receptor de salida de pwm.
1:3 ejes acelerómetro y giroscopio.
2: de Arduino Uno.
1: 3 amp bec.
bec de 1: 1 amp, 10 amp esc.
1: 3 la célula lipo de 2200mah.
3: 9 gramos de servos.
tamaño 1: 300 a 1500kv corredor.
Y un completo lío de cables.













