Paso 4: conclusión
Una vez que el código ha sido cargado, conecte la batería de 9v y ver que empezar después de todo lo que viene dentro de la gama de umbral!
Solución de problemas:
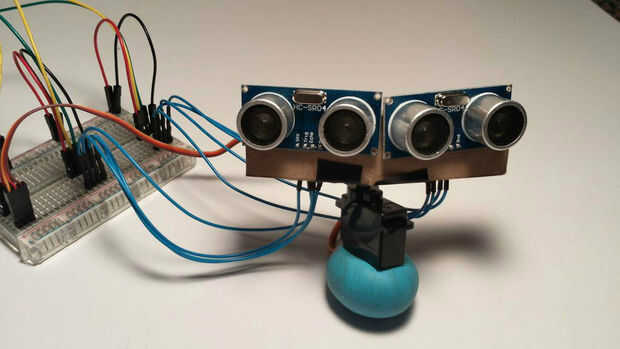
- Si los sensores girando al revés, intente cambiar los cables en los pines 10 y 11 con los cables en los pines 12 y 13.
- Si los sensores no mover en absoluto, o sólo un poco, revise el cableado. Es muy fácil moverse accidentalmente los cables de puenteo sobre un punto en el protoboard.
- Si los sensores avanzan muy lentamente, vuelva al código y asegúrese de que la depuración es falsa. La serie de comunicaciones puede realmente reducir la velocidad el tiempo de reacción del robot.
- Si sigues teniendo problemas, primero asegúrese de que Arduino está encendido y que todos los cables de puente en los lugares correctos. Cambiar el debug a true y comprobar si están funcionando los sensores de la gama. También puede probar el servo para asegurarse de que también está en condiciones de trabajo.
Algunas mejoras que estoy planeando para el futuro:
- Mejorar la precisión de los sensores con el uso de un sensor de temperatura
- impresión 3D montaje el montaje del sensor y servo
- Agregar otro servo y sensor para permitir el movimiento vertical
- Conmutación a los servos con motores paso a paso para permitir la continuación de 360 grados
Tuve un gran tiempo escribir este instructable y espero hacer muchos más! Déjeme por favor saber como lo hice y cómo puedo mejorar mi futuro instructables.













")