Paso 2: Las conexiones finales y calibraciones
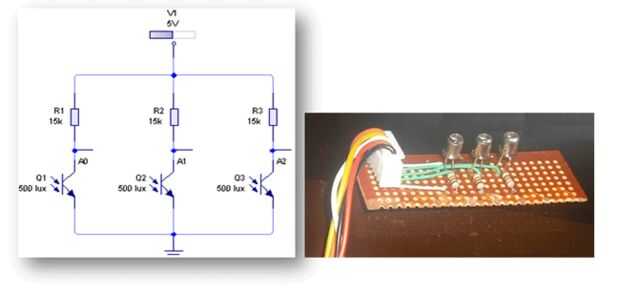
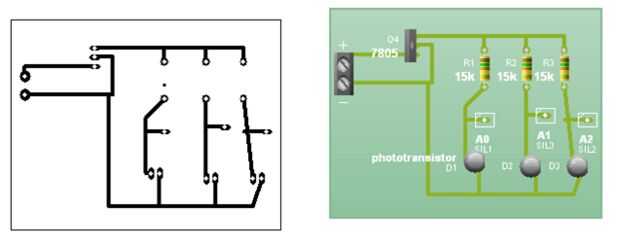

¿Hacer el circuito de Veroboard es decir, uno de los extremos de 15k? resistencia se coloca con el colector del fototransistor y el otro extremo del resistor se suministra con fuente de alimentación de 5 voltios el emisor del transistor está conectada a tierra. El pin analógico de arduino está situado en el cruce entre el colector y la resistencia. Tres circuitos en la misma configuración se hace.
En el circuito siguiente Q1, Q2 y Q3 son los fototransistores y A0, A1 y A2 son los pines de entrada analógicos de arduinouno de la cual se observarán los valores.
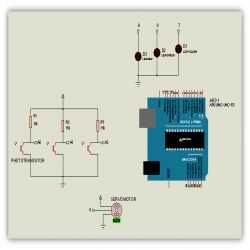
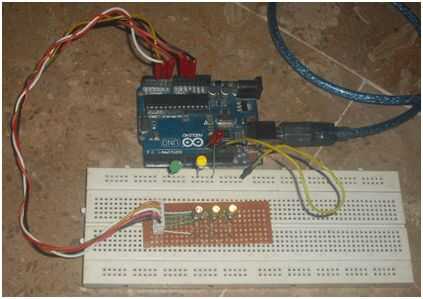
Una vez que los valores son seleccionados, para comprobar y convencer de que los valores son ya sea corregir o no los medios si los valores son distinguir entre presencia y ausencia de obstáculo o no. Por esta razón se coloca tres LED en el circuito. Iluminará cada vez que la intensidad cruza la Cordillera de umbral.
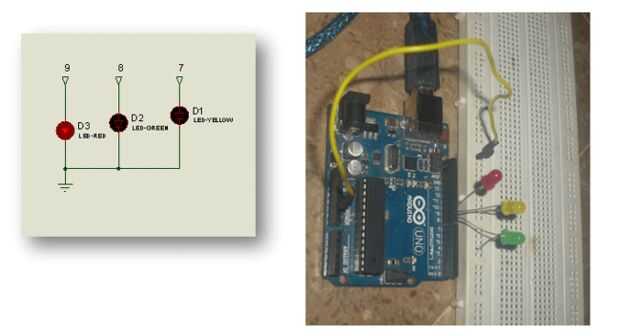
Los tres LEDs uno para cada carril están conectados a los pines de salida digital de arduino (es decir, digitales pines 7, 8 y 9). Brillan 'ON' al sensor detectará la presencia de coches y permanecerá 'OFF' cuando ningún coche actual. Aquí en esta figura, LED (D3) conectado con pin digital 9 es 'ON' que indica que el vehículo es detectado en el pin analógico A2 (más explicado en el paso siguiente).
Los pines analógicos (A0, A1, A2) y pins(7,8,9) digital están relacionados con entre sí de tal manera que la instancia a la que el coche será justo debajo del sensor, el pin analógico (A0) cruzará su rango umbral fijado que significa el LED en el pin 7 se iluminará en más tiempo permanece apagado. Del mismo modo A1 y A2 están vinculados los pines 8 y 9 respectivamente.
En Moto de carreras, la dirección de la moto se controla inclinando el teléfono celular. Esto puede hacerse a mano robótica que consiste en el motor servo. Este motor está programado para la mano en el ángulo de inclinación. El teléfono móvil se coloca en la base (cualquier material puede ser utilizado como base). Aquí se utiliza una caja que se hace igual el tamaño del móvil con techo pequeño para que el Consejo de Vero (circuito del sensor) se puede montar en el móvil. Esta caja se coloca en la pinza de la mano robótica.







 (impresión 3D)")



