Paso 1:
![]()
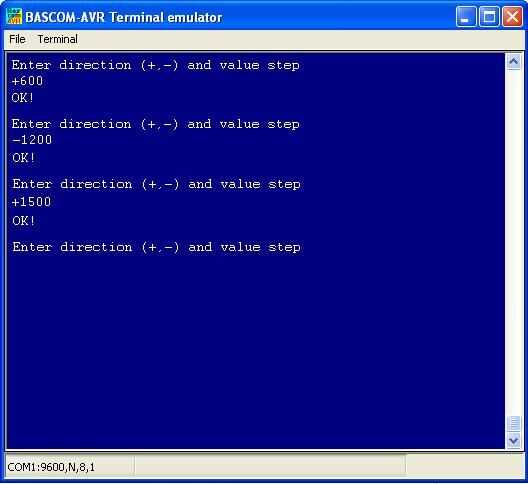
Al girar el controlador genera un mensaje de puerto COM acerca de entrar en la dirección del movimiento (+ o -) y el número de pasos. Envíe el comando necesario y el controlador girará el eje del motor, una vez cometido el número requerido de pasos, el controlador se ejecute el comando "¡ OK!" y otra vez le dará un comando de entrada de datos.