Paso 2: Fijación del ángulo del potenciómetro


En primer lugar, desatornillar los cuatro tornillos de embalaje y retire la parte superior del motor servo. A continuación, quite todos los engranajes pequeños para acceder al potenciómetro.
Algunas explicaciones:
El potenciómetro es una resistencia variable. Da a la servo-driver un nivel de voltaje que es la imagen de la posición angular del tren de engranajes. Esta posición se compara con el ángulo a y la velocidad del motor es directamente proporcional a la diferencia entre ambos. El motor gire rápidamente (en el buen sentido) cuando el tren de engranajes es muy lejos desde el ángulo objetivo, se ralentiza cuando se pone más cerca y se detiene cuando se alcanza el ángulo.
El director de este Instructable consiste en fijar la posición de este potenciómetro el ángulo medio. Cuando se envía un comando izquierdo completo del motor servo, se convertirá rápidamente en esta dirección (gran diferencia con el ángulo del potenciómetro). Cuando se envía un comando completamente a la derecha, haremos lo mismo en la otra dirección. Y cuando se envía un comando de ángulo medio, se detendrá (ninguna diferencia con el ángulo del potenciómetro). Para mandos intermedios, obtenemos velocidades intermedias.
Debido a la posición fija del potenciómetro, la diferencia de ángulo para un comando determinado será siempre el mismo y la velocidad de rotación será constante.
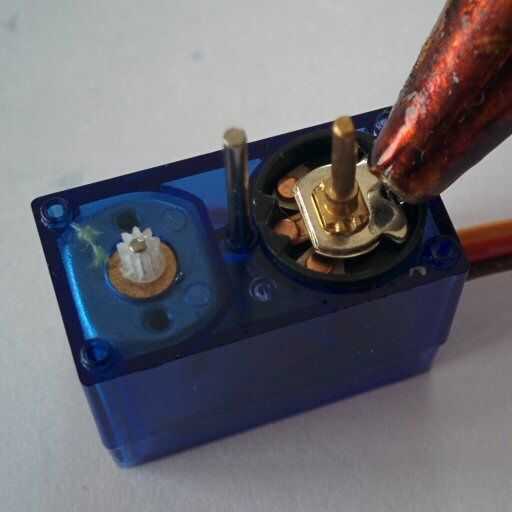
Para fijar la posición del potenciómetro, enchufe el tren de engranajes y moverse a la posición media, como se muestra en la fotografía. Cuando se hace, utilizar el aplicador de pegamento caliente para pegar para asegurarse de que nunca se moverá.






")

")




 en el 1999 Ford Mustang")