Paso 2: Cómo funciona...
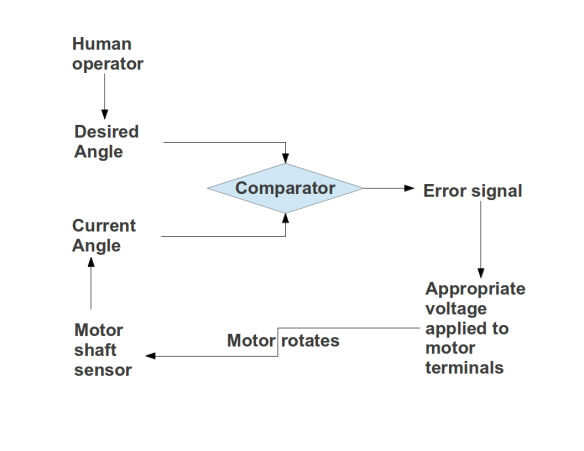
Con el fin de controlar la posición del eje de un motor de DC (y así convertirlo en un motor cinemático), necesita poder 'codificar' la posición del eje. Este cargo se comparará contra una posición y se generará un error posicional. Tensión aplicada a los bornes del motor será con el fin de hacer que el eje gire para reducir el error posicional en cero. Este tipo de un sistema de 'retroalimentación' también se utiliza en motores servos disponibles comercialmente.
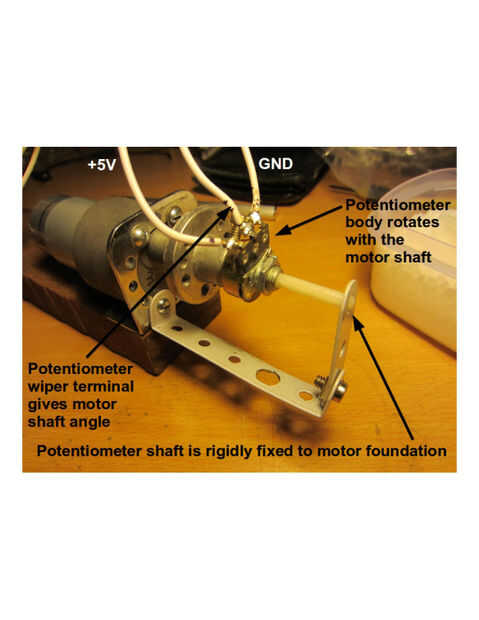
Para implementar el circuito de retroalimentación necesita fijar el eje un potenciómetro giratorio para la Fundación del motor permitiendo cuerpo del potenciómetro rotar libremente con el eje del motor. Este arreglo es conocido como un codificador de eje. Ahora, como el motor shaftrotates, habrá un desplazamiento angular entre el eje del potenciómetro y su cuerpo. Detectando la tensión en el terminal del limpiador del potenciómetro, se puede medir la posición angular del eje del motor. Este ángulo entonces será alimentado en el lazo de retroalimentación permite software de un microcontrolador para el control de la posición angular del eje del motor.
")

")










