Paso 2: Concepto actual arranque
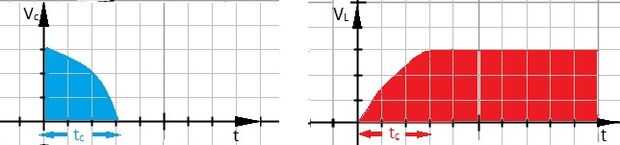
Si el motor está pidiendo corriente la batería suministrará obviamente, pero cómo será motor demanda un valor que es importante entender. Motores DC tienen un alto par de arranque para mover continuamente. prácticamente, mayoría de los motores que va a utilizar para la fabricación de robots a motores, requieren de un gran alto esfuerzo de torsión para iniciar, es decir, debido a la carga más grande, así necesitan una corriente más alta para empezar. Teóricamente esta corriente es necesaria para vencer la corriente generada por la back EMF, y por qué necesitamos un arrancador para un motor DC. Podemos poner un potenciómetro al comienzo para limitar la corriente y aumentar el valor poco a poco. Pero en caso de que le van a hacer 8-10 motores fijos en un robot automático que no te hecho a mano, y así tenemos que pensar en otro método de arranque. Los libros de texto no proporcionan un método simple y práctico. Lo que podemos hacer es jugar poco con gráfico de DC. Se puede hacer mediante el uso de elementos reactivos del circuito como resistores, capacitores o inductores. Resistencias que limitará la tensión pero lo hará sobre el período entero de la vuelta en. De L o inductores se resisten el cambio en la corriente por un tiempo muy corto (dI/dt) por lo tanto actuará como un corto entre el alambre mucho antes de que se resuelva el problema EMF trasero. Cargo de la tienda de la tapa cuando la tensión se enciende y se cobran y así conectándolo a través de los terminales o en paralelo con el motor, aumentará la tensión lentamente hasta el valor máximo, como se aprecia en el gráfico.











")
