Paso 3: RPM, carga y corriente
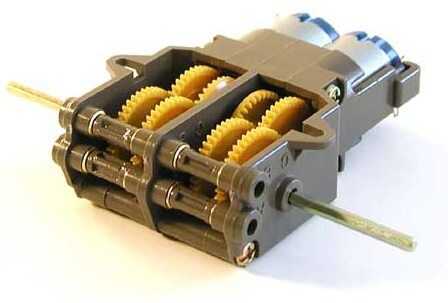
A veces uno debe se han preguntado, a motores tienen diferentes RPM para la misma diferencia de potencial. Para controlar la velocidad o RPM de un DC motor podemos limitar la potencia de entrada al motor. Pero como depende de la corriente en el circuito, duramente seremos capaces de controlar la it sin alterar el circuito. Así la única opción que nos queda es el control de voltaje y de tensión constante que sólo podemos limitar la tensión por varios reguladores de voltaje como si queremos ejecutar un motor de 5 voltios podemos usar IC LM7805 para limitar el voltaje de entrada (funciona hasta 35 voltios), o podemos reducir el número de revoluciones mediante la introducción de una caja de engranajes en el eje. Este método particularmente aumenta la carga en el eje como resultado de que motor pide un valor de corriente más grande. Por ejemplo, yo estuve realizando un experimento en motores de corriente continua y su capacidad de carga y quedé siguiendo datos: corriente para un juguete motor de la C.C. era 50mA, por 100 RPM motor era 190mA, para 600 RPM 600mA, etc.. Así, elegir un incorrecto par de motor-pila puede limitar la performance de tu Bot a tal vez de algunos minutos.











")
