Paso 3: Cómo funciona
Servos son dispositivos inteligentes. Usando un pin de entrada, que recibe la posición de Arduino y van allí. Internamente, tienen un controlador de motor y un circuito de retroalimentación que asegura que el brazo del servo llegue a la posición deseada. Pero, ¿qué tipo de señal que reciben en la entrada de pin?
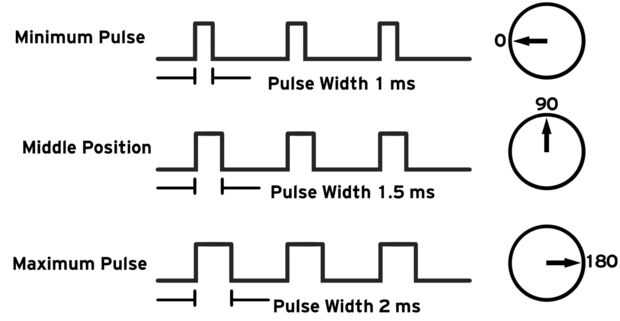
Es una onda cuadrada similar a PWM. Cada ciclo de la señal dura 20 milisegundos y para la mayoría de las veces, el valor es bajo. Al principio de cada ciclo, la señal es alta para un tiempo entre 1 y 2 milisegundos. En 1 milisegundo representa 0 grados y en 2 milisegundos representa 180 grados. En el medio, representa el valor de 0 – 180. Este es un método muy bueno y confiable. El gráfico hace un poco más fácil de entender.
Recuerde que utilizando la librería Servo automáticamente deshabilita la funcionalidad PWM en pines PWM 9 y 10 en el Arduino UNO y tableros similares.
Desglose del código
El código simplemente declara el objeto servo y luego inicializa el servo utilizando la función servo.attach() . No debemos olvidar incluir la librería servo. En el loop(), fijamos el servo en 0 grados, espere y vuelva a ponerlo a 90 y luego a 180 grados.













