Paso 2: Programozás/programación
Arduino
pot1 int;
int pot2;
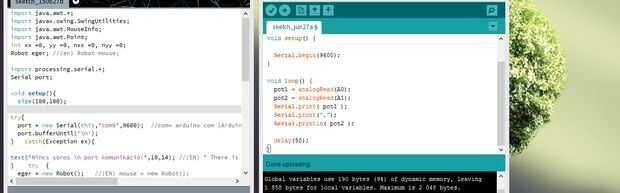
void setup() {}
Serial.Begin(9600);
}
void loop() {}
Pot1 = analogRead(A0);
Pot2 = analogRead(A1);
Serial.Print (pot1);
Serial.Print(",");
Serial.println (pot2);
Delay(50);
}
Procesamiento de
Import java.awt.*;
Import javax.swing.SwingUtilities;
Import java.awt.MouseInfo;
importación java.awt.Point;
int xx = 0 yy = 0, nxx = 0, nyy = 0;
Robot eger; ratón (en) Robot;
Import processing.serial.*;
Puerto serial;
void setup() {}
Size(100,100);
trate de {Puerto = new Serial(this,"com9",9600); //com= arduino com (Arduino ide -> Herramientas -> Puerto: "comX"
port.bufferUntil('\n');
} catch (Exception ex) {}
texto ("no a soros \n puerto komunikáció!", 10, 14); (EN) "No hay ninguna comunicación puerto serie!"
} {} de tratar
Eger = Robot() nuevo; Ratón (EN) = Robot() nuevo;
} catch (AWTException e) {}
println ("Nem támogatott una clase de robot!"); Exit(); (EN) "no admite la clase robot!"
}
} void draw()
{System.out.println ("("+ nxx +"," + nyy + "nyy+")""); nxx=MouseInfo.getPointerInfo () .getLocation () 2.x; .y en nyy=MouseInfo.getPointerInfo () .getLocation ();}
void serialEvent(Serial myPort) {}
String bejovo = myPort.readStringUntil('\n');
Si (bejovo! = null) {}
bejovo = trim(bejovo);
int [] potik = int (split (bejovo, ","));
Si (potik.length > = 2) {}
Si (nxx > xx + 20 || nyy > yy + 20 || nxx < xx 20|| NYY < AA-20) {xx = nxx; yy=nyy;delay(250);}
Else {}
XX = potik [0]; YY = potik [1]; eger.mouseMove(xx,yy); }
} } }












")
